VITESSE - ACCELERATION VITESSE

VITESSE - ACCELERATION
Contenu du Dossier : 6 pages
S. PIGOT
M_212-01.Doc (Word7) CINEMATIQUE Version 02
CINEMATIQUE Mécanique
VITESSE - ACCELERATION
Référence au programme S.T.I Référence au module
2- Cinématique.
2-1 Mouvement relatif de deux solides en liaison glissière ou pivot
2-1.2 Caractérisation du mouvement d’un point d’un solide
Module 7 : :Cinématique
1- Objectifs de la séquence :
Définir le graphe des déplacements et des vitesses,
Définir la relation entre déplacement, vitesse et
accélération.
2- Situation pédagogique :
prérequis
Géométrie vectorielle.
connaissances visées
Equations horaires.
nature de la démarche
Acquisition de connaissances.
à savoir Tracer le graphe des déplacements et des vitesses.
1. VITESSE
1.1 Notion de vitesse
Soit (S) un solide en mouvement dans un repère R0.
Soit M un point appartenant au solide (S), de
coordonnées x(t), y(t) et z(t) à l’instant t.
Soit T(M∈S/R0) la trajectoire de M.
Sur cette trajectoire, choisissons par convention :
• une origine M0 ;
• un sens positif ;
• une unité de longueur.
O
R0
S
R
Q
M2
M1
M0
(S)
T(M∈S/R0)
On relève, aux instants t0, t1, t2, les positions du point M appartenant à S dans le repère R0.
Instants t0t1t2
Position sur T(M∈S/R0) M0M1M2
Abscisse curviligne s = f(t) s0 = 0 s1 = M0M1s2 = M0M2
S = arc M0M = valeur algébrique, à l’instant t, de l’arc orienté M0M

1.2 Vitesse algébrique moyenne
Entre t1 et t2 : V(t1Æt2)moy = 12
12
tt
ss
−
− = ∆t
∆s= t
D
VITESSE - ACCELERATION Page 2 / 6
S.PIGOT
M_212-01.DOC(Word7) CINEMATIQUE Version 02
D : distance en mètre et t en seconde
1.3 Vitesse algébrique instantanée
Si t2 est très proche de t1, alors ∆t devient
infiniment petit.
v(t) = t
d
sd = s’(t)
(dérivée de l’abscisse curviligne)
1.4 Vecteur vitesse instantanée
Le vecteur vitesse du point M dans son mouvement par rapport au repère fixe R0, est égal à la
dérivée vectorielle (par rapport au temps) du vecteur position, dans le repère R0.
)S/RV(M 0∈ = t∆
MM'
lim 0t∆→ )S/RV(M 0∈ =
0
dt
OMd
ℜ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
Le vecteur )S/RV(M 0∈ est tel que :
- son origine est confondue avec la position de
M à l’instant t ;
- il est toujours tangent en M à la trajectoire
T(M∈S/R0) ;
- il est orienté dans le sens du mouvement ;
- sa norme est )S/RV(M 0∈= |v| = td
sd ;
- unité : mètre par seconde, ou m/s.
O
R0
S
R
Q
M
2
M
1
M
0
(S)
T(M∈S/R0)
)S/RV(M 0∈
Autre expression possible : x(t) dt
dx
Si
OM y(t) Alors )S/RV(M 0∈dt
dy
z(t)
R0dt
dz R0

2 ACCELERATION
2.1 Accélération tangentielle moyenne
Si le point M se situe en M1 à l’instant t1et qu’il
possède une vitesse instantanée v1 ; s’il passe à
l’instant t2 en M2 à la vitesse v2, son accélération
tangentielle moyenne entre t1 et t2 vaut :
at(t)moy = 12
12
tt
vv
−
− = ∆t
∆v
O
R0
S
R
Q
M2
M1
(S)
T(M∈S/R0)
L’accélération peut aussi être notée Γ(M∈S/R0) ou γ (M∈S/R0).
VITESSE - ACCELERATION Page 3 / 6
S.PIGOT
M_212-01.DOC(Word7) CINEMATIQUE Version 02
2.2 Accélération tangentielle instantanée
A l’instant t quelconque, elle correspond à la limite du rapport ∆t
∆v lorsque ∆t Æ 0.
a
t(t) = dt
dv ; or v(t) = t
d
sd ; d’où at(t) = 2
2
t
d
sd = s’’(t)
2.3 Vecteur accélération
:(M/R0) =
0
0
dt
)V(M/d
ℜ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛ℜ=
0
2
2
dt
OMd
ℜ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
Composantes tangentielle et normale de l’accélération :
Soient :
• G un vecteur unitaire normal en M à la
trajectoire T(M∈S/R0), orienté vers
l’intérieur de la courbure ;
• M un vecteur unitaire tangent en M à
T(M∈S/R0), orienté comme la trajectoire.
O
R0
S
R
Q
M
T(M∈S/R0)
G
M
Dans cette base (G,M), l’accélération peut s’écrire :
:(M/R0) = an×G + at×M
avec :
• an = accélération normale = R
v2
(R représente le rayon de courbure)
• at = accélération tangentielle = dt
dv

3 CAS DU MOUVEMENT DE TRANSLATION RECTILIGNE UNIFORME
C’est le mouvement le plus simple, sans accélération (a=0) et avec une vitesse constante au
cours du temps.
Il est noté M.T.R.U.
3.1 Equations de mouvement
Soient :
t0 : instant initial, t0 = 0 ;
x0 : le déplacement initial, à t = t0 ;
v0 : la vitesse initiale, à t = t0 ;
x(t) : le déplacement à l’instant t.
v(t) : la vitesse à l’instant t. Instant t Q
Instant t0
x
x0
O
Origine du repère
Equations
VITESSE - ACCELERATION Page 4 / 6
S.PIGOT
M_212-01.DOC(Word7) CINEMATIQUE Version 02
a(t) = 0
v(t) = v0 = constante
x(t) = v0 *∆t + x0
x0 et v0 sont les conditions
initiales du mouvement ; ∆t = t-t0
Graphe de position
Graphe de vitesse
x
(t) = v0.t + x0
0
t
x
0
x
(t)
v(t) = v0
0t
v0
v(t)
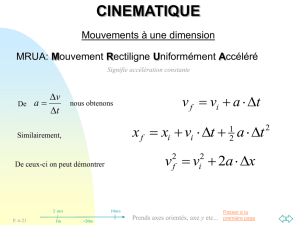
4 CAS DU MOUVEMENT DE TRANSLATION RECTILIGNE
UNIFORMEMENT ACCELERE
Il sert de modèle à de nombreuses études simplifiées. Pour ces mouvements, accélérés (a>0)
ou décélérés (a<0), l’accélération reste constante au cours du temps.
Il est noté M.T.R.U.V.
4.1 Equations du mouvement
Soient :
t0 : instant initial, t0 = 0 ;
x0 : le déplacement initial;
a0 : l’accélération initiale ;
v0 : la vitesse initiale ;
x : le déplacement à l’instant t. Instant t
Q
Instant t0
x
x0
O
v0v
Equations
a(t) = a0 = constante
v(t) = a0.x ∆t + v0
x(t) =2
1a0.x ∆t ² + v0.x ∆t + x0
x0, v0 et a0 sont les conditions initiales
du mouvement.
Graphe de position
x
=
f
(t)
(branche de
parabole)
0t
x
0
x
Graphe de vitesse
v = v0 + a.t
0t
v0
v

5 MOUVEMENT DE ROTATION : GENERALITES
5.1 Rotation d’un solide
La rotation d’un solide est définie par son
mouvement angulaire (tous les points de
ce solide ont même vitesse angulaire).
θ2 = θ1 + ∆θ
M1
M2
Q
θ
1
θ
2
∆
θ
Instant t1
Instant t2
5.2 Vitesse angulaire, ou vitesse de rotation ω
Vitesse angulaire moyenne : ∆
t
∆θ
t
t
θθ
ω
12
12
moy =
−
−
= [en radian / seconde]
VITESSE - ACCELERATION Page 5 / 6
S.PIGOT
M_212-01.DOC(Word7) CINEMATIQUE Version 02
Vitesse angulaire instantanée : θθ'
d
t
dθ
ω&
===
Remarques :
1 tour = 2π radian = 360°; Si N est la vitesse de rotation en tour/min, alors : 30
π.N
ω=
5.3 Accélération angulaire α
ωω'
d
t
dω
α&
=== ou θ'θ'
d
t
θd
α2
2
&&
===
5.4 Vitesse d’un point
VM = ω.OM = ω.r
Remarque : puisque ω a même valeur pour
tous les points du solide, la vitesse linéaire
O(M∈S/R0) varie linéairement avec la distance r
à l’axe de rotation.
M
Q
TM
VM
r
O
VN
VP
NP
 6
6
1
/
6
100%