Cours Module: Vibrations

Dr Fouad BOUKLI HACENE
E P S T T L E M C E N
A N N É E 2 0 1 5 - 2016
Chapitre 2: Mouvement oscillatoire libre
à un degré de liberté
1ière Partie: VIBRATIONS

Objectifs:
1. L’équation différentielle d’un mouvement harmonique
2. La solution
3. Quelques exemples d’applications:
Oscillations mécaniques
Oscillations électriques
Oscillations acoustiques

Définitions:
Un système isolé oscillant à un degré de liberté est
déterminé par la coordonnée généralisée q(t) qui est
l’écart d’amplitude par rapport à l’équilibre stable.
On définit l’oscillation harmonique par l’équation
différentielle suivante
Où ω0 est appelée la pulsation propre du système
0)()( 2
0 tqtq

La solution de cette équation différentielle est de la forme
sinusoïdale telle que:
)sin()cos()()cos()( 02010 tAtAtqoùtAtq
Pour la première forme de la solution q(t):
les constantes A et ϕ représentent respectivement
l’amplitude des oscillations et le déphasage qui sont
déterminées par les conditions initiales suivantes :
La deuxième forme de la solution :
Elle souligne que les solutions forment un espace vectoriel,
0
0
)0(
)0(
qtq
qtq

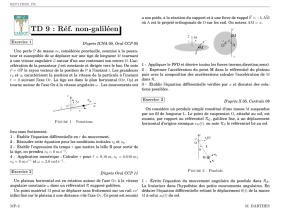
L’allure de la solution q(t) ainsi que la vitesse du mobile sont
représentées dans la figure 1.2
Figure 1.2 : Mouvement oscillatoire harmonique
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
1
/
36
100%