Dynamique en coordonnées cartésiennes

Mécanique 2 Dynamique en coordonnées
cartésiennes
Lycée Polyvalent de Montbéliard - Physique-Chimie - TSI 1 - 2016-2017
Contenu du programme officiel :
Notions et contenus Capacités exigibles
Notions sur les quatre interactions fondamentales. - Distinguer les interactions de portée illimitée de celles dont la portée est
limitée à la dimension du noyau atomique.
Forces.
Loi des actions réciproques.
- Utiliser les forces usuelles (en particulier : poids, forces de frottements
fluide et solide, poussée d’Archimède)
- Établir un bilan des forces et en rendre compte sur une figure.
Quantité de mouvement d’un point matériel. - Utiliser l’expression de la quantité de mouvement d’un point matériel.
Référentiel galiléen. Loi de l’inertie. - Définir le mouvement relatif d’un référentiel galiléen par rapport à un
autre référentiel galiléen.
Quantité de mouvement d’un point.
Principe fondamental de la dynamique dans un référen-
tiel galiléen.
- Déterminer les équations du mouvement d’un point matériel ou du centre
d’inertie d’un solide.
Mouvement dans le champ de pesanteur uniforme. - Mettre en équation le mouvement sans frottement et le caractériser
comme un mouvement à vecteur-accélération constant.
Influence de la résistance de l’air. - Prendre en compte par une approche numérique des frottements fluides
pour modéliser une situation réelle.
- Exploiter numériquement une équation différentielle sans la résoudre ana-
lytiquement : analyse en ordres de grandeur, détermination de la vitesse
limite, utilisation d’un logiciel d’intégration numérique.
-Proposer un protocole expérimental de mesure de frottements
fluides.
Lois de Coulomb du frottement de glissement dans le
seul cas d’un solide en translation.
- Exploiter les lois de Coulomb fournies dans les trois situations : équilibre,
mise en mouvement, freinage.
- Formuler une hypothèse (quant au glissement ou non) et la valider.
-Mettre en œuvre un protocole expérimental permettant de me-
surer un coefficient de frottement solide.
En gras les points devant faire l’objet d’une approche expérimentale.
Table des matières
1 Forces et quantité de mouvement 2
1.1 Les quatre interactions fondamentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Notiondeforces............................................. 2
1.3 La quantité de mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Les trois lois de Newton 3
2.1 La première loi de Newton : le principe d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 La seconde loi de Newton : le principe fondamental de la dynamique . . . . . . . . . . . . . . 4
2.3 La troisième loi de Newton : la loi des actions réciproques . . . . . . . . . . . . . . . . . . . . 5
3 Méthode générale pour étudier un problème de mécanique 5
4 Un premier exemple de mouvement : la chute libre 5
4.1 Première approximation : la chute libre sans frottements . . . . . . . . . . . . . . . . . . . . . 5
4.2 Prise en compte des frottements fluides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
5 Étude des corps immergés dans un fluide 10
5.1 La poussée d’Archimède . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.2 Un problème dynamique : la montgolfière . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.3 Un problème de statique : l’iceberg. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
6 La force de frottement entre des solides 11
6.1 LesloisdeCoulomb.......................................... 11
6.2 L’équilibre................................................ 12
6.3 Lamiseenmouvement......................................... 13
6.4 Lefreinage................................................ 14
6.5 Hypothèse de glissement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Maxime Champion - www.mchampion.fr 1/14

Mécanique 2 : Dynamique en coordonnées cartésiennes Maxime Champion
Dans le chapitre précédent, nous nous sommes intéressés à l’étude du mouvement en soi à travers l’étude
cinématique. Maintenant, nous allons étudier les causes du mouvement, les forces. Grâce aux lois établis par
Isaac Newton en 1687 dans son ouvrage Philosophiae naturalis principia mathematica, nous allons ensuite
relier ces forces à la cinématique pour étudier le mouvement et ses causes. Il s’agit de l’étude dynamique.
1 Forces et quantité de mouvement
1.1 Les quatre interactions fondamentales
Les interactions physiques entre les systèmes sont classés en quatre grand types. Toutes les interactions
physiques se rapportent à une de ces interactions fondamentales.
L’interaction faible : elle intervient au niveau des nucléons, elle de faible intensité et de très courte
portée (≈10−18 m).
L’interaction forte : elle est responsable de la cohésion des noyaux atomiques. Grâce à cette interaction,
les protons restent dans le noyau malgré leurs charges électriques identiques. Elle est de très forte intensité
mais sur une très courte portée (≈10−14 m).
Ces deux interactions, faibles et fortes, se manifestent lors des transformations nucléaires.
L’interaction électromagnétique : elle est à longue portée (distance infinie) entre les particules char-
gées. Les particules de même signe se repoussent tandis que celles de signes opposées s’attirent.
Remarque : En réalité, l’interaction électromagnétique et l’interaction faible ne font qu’une
seule interaction, dite électrofaible. Les travaux théoriques pour le démontrer ont été réalisés
de façon séparée par Sheldon Glashow, Abdus Salam et Steven Weinberg dans les années 1960,
ce qui leur a valu conjointement le prix Nobel de Physique en 1979.
Au niveau microscopique, cette force explique les frottements de tout type. En effet, en première approxi-
mation, on peut dire que les atomes ne se superposent pas, et donc la matière, car les nuages électroniques
se repoussent.
L’interaction gravitationnelle : elle est à longue portée (distance infinie) entre les particules massives
qui s’attirent deux à deux.
À notre échelle d’étude, seules les deux dernières interactions sont visibles.
1.2 Notion de forces
Définition. Une force caractérise l’action d’un système matériel sur un point matériel M. Une force peut
dépendre à la fois de la nature physique du point Met du système, des positions et vitesses de Met du
système.
Une force peut modifier un mouvement ou déformer un système. Une force est indépendante du référentiel
d’étude, elle s’applique quelle que soit la façon dont le physicien étudie le système.
Son unité est le newton (N).
Par exemple, la force électromagnétique qu’une particule 1 de charge q1exerce sur une autre particule
2 de charge q2dans le vide vaut
#”
FEM =q1q2
4πε0r2
#”
u
avec ε0la permittivité électrique du vide, rla dis-
tance entre les deux particules et #”
ule vecteur uni-
taire placée sur la particule 2, dirigée selon l’axe
reliant les deux particules et orienté à l’opposé
de la première particule. Ainsi, deux particules de
charge de même signe se repoussent tandis que deux
charges de signe opposé s’attirent.
×
M1(q1)
×
M2(q2)
r
#”
u
2/14

Mécanique 2 : Dynamique en coordonnées cartésiennes Maxime Champion
De même, la force gravitationnelle qu’une parti-
cule 1 de masse m1exerce sur une autre particule 2
de masse m2vaut
#”
FG=−G m1m2
r2
#”
u
avec Gla constante universelle de gravitation.
×
M1(m1)
×
M2(m2)
r
#”
u
#”
FG
Propriété. Les forces sont soit
de contact, comme les frottements;
soit des forces à distance et s’appliquent sans support matériel pour les propager, comme la force
gravitationnelle.
1.3 La quantité de mouvement
Définition. Considérons un point matériel Mde masse mdans un référentiel donné R. Le vecteur vitesse
de ce point matériel dans ce référentiel est noté #”
v(M/R).
On définit le vecteur quantité de mouvement par
#”
p(M/R) = m#”
v(M/R).
Cette définition est vraie uniquement dans le cadre de la mécanique newtonienne, c’est-à-dire que l’on
suppose toujours que vcavec cla célérité de la lumière dans le vide et vle module du vecteur vitesse
#”
v(M/R).
Pour un solide, on définit la quantité de mouvement par rapport à la vitesse du centre de gravité du
solide.
2 Les trois lois de Newton
Les trois lois de Newton définies ici sont la base de toute la mécanique classique. Elles ont été établies
en 1687 et permettent toujours de décrire une grande partie des mouvements mécaniques.
2.1 La première loi de Newton : le principe d’inertie
Définition. Il existe des référentiels privilégiés appelés référentiels galiléens dans lesquels un point
matériel Misolé, soumis à aucune action mécanique, est
soit au repos ;
soit animée d’un mouvement rectiligne uniforme.
Considérons une particule animée d’un mouvement rectiligne uniforme dans un référentiel galiléen.
Considérons un autre référentiel en translation uniforme par rapport à ce référentiel. Dans ce cas, la
particule est toujours isolée et soumise à aucune action mécanique et son mouvement est toujours rectiligne
uniforme. On peut par exemple penser au référentiel du sol et à celui lié à une voiture en mouvement
rectiligne uniforme.
Propriété. Tout référentiel en translation uniforme par rapport à un référentiel galiléen est galiléen.
En réalité, les référentiels rigoureusement galiléens n’existent pas. Mais on peut en considérer certains
comme approximativement galiléens. En débutant un problème de mécanique, il faut toujours préciser le
référentiel d’étude et préciser qu’on le considère comme galiléen.
Les référentiels les plus utiles sont définis par une horloge placée sur Terre et par un repère particulier.
Ce sont
le référentiel héliocentrique RSqui a pour origine le centre de le Soleil et dont les trois axes sont
dirigés vers des étoiles fixes dans le ciel. Il est supposé galiléen si le mouvement étudié est plus court
qu’un trajet significatif du Soleil dans la galaxie, soit une durée inférieure à plusieurs années ;
le référentiel géocentrique RGqui a pour origine le centre de la Terre et dont les trois axes sont dirigés
vers des étoiles fixes dans le ciel. Il est supposé galiléen si le mouvement étudié est plus court qu’un
trajet significatif de la Terre autour du Soleil, soit une durée courte devant une année ;
3/14

Mécanique 2 : Dynamique en coordonnées cartésiennes Maxime Champion
le référentiel terrestre RT, ou référentiel du laboratoire, qui a pour origine le centre de la Terre et
dont les trois axes sont fixes par rapport à la Terre. Il est supposé galiléen si le mouvement étudié est
plus court qu’une rotation significative de la Terre, soit une durée courte devant une journée. C’est le
référentiel dans lequel nous étudierons la plupart des systèmes en CPGE.
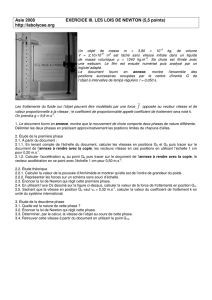
La figure 1 schématise les différents référentiels.
•
S
RS
•
T
RG
Axe de rotation
Plan de l’écliptique
Fig. 1 – Les différents référentiels galiléens.
2.2 La seconde loi de Newton : le principe fondamental de la dynamique
Définition. Dans un référentiel Rsupposé galiléen, le vecteur quantité de mouvement d’un point Mde
masse mvérifie d
dt(#”
p(M/R)) = X#”
Fext→M.
Soit la dérivée du vecteur quantité de mouvement est égale à la somme des forces extérieures
appliquées au point M.
Cette loi est l’une des lois les plus importantes de la Physique. Elle permet de relier le mouvement
cinématique - la dérivée de la vitesse - avec ses causes - les forces extérieures.
Lorsque le point d’étude et le référentiel sont bien précisés en début d’exercice (et uniquement dans ce
cas !), on peut écrire simplement #”
p(M/R) = #”
p=m#”
v. On remarque alors que
d#”
p
dt=dm
dt
#”
v+md#”
v
dt.
Propriété. Dans un référentiel Rsupposé galiléen, le vecteur quantité de mouvement d’un point Mde
masse mfixe au cours du temps vérifie la relation
m#”
a=X#”
Fext→M
où #”
aest le vecteur accélération du point M.
Remarque : On remarque que si #”
a=#”
0, c’est-à-dire si le mouvement est rectiligne uniforme
ou s’il est nul, on a P#”
Fext→M=#”
0. Cette relation, parfois appelé principe fondamental
de la statique, en lien avec le principe fondamental de la dynamique, porte mal son nom. En
effet, elle décrit aussi des mouvements rectilignes uniformes non statiques.
4/14

Mécanique 2 : Dynamique en coordonnées cartésiennes Maxime Champion
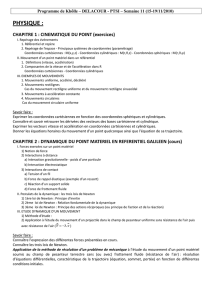
2.3 La troisième loi de Newton : la loi des actions réciproques
Définition. Soient deux points M1et M2en interactions. Alors les forces exercées du point 1 sur le point
2 sont égales à l’opposé des forces exercées du point 2 sur le point 1
#”
F1→2=−#”
F2→1.
•
M1
•
M2
#”
F2→1
#”
F1→2
Fig. 2 – Le principe des actions réciproques.
3 Méthode générale pour étudier un problème de mécanique
Avant d’étudier en détails plusieurs exemples de mécanique, voici la méthode à utiliser systématiquement
pour résoudre un problème de mécanique. Cette méthode doit être connue sans hésitations.
Méthode pour aborder un problème de mécanique :
1. Définir le système étudié, préciser le référentiel galiléen d’étude, préciser le système de coordonnées.
Pour le moment, nous n’avons étudié que les coordonnées cartésiennes. Au cours du chapitre
M3 plus tard dans l’année, nous étudierons d’autres coordonnées. Il faut donc bien les préciser
en premier.
2. Faire un schéma du système dans une situation quelconque.
Si le schéma est dans une situation particulière, on pourra avoir l’impression que certains
vecteurs sont orthogonaux ou parallèles, ce qui faussera toute la suite du raisonnement.
3. Représenter les forces sur le schéma et réaliser un bilan des forces en donnant leurs expressions dans
le référentiel d’étude.
Les forces sont indépendantes du référentiel, mais parfois leur expression analytique peut
changer d’un référentiel à l’autre, notamment à cause des repères qui peuvent être très diffé-
rents.
4. Appliquer la seconde loi de Newton en la citant.
5. Exprimer les vecteurs cinématiques position, vitesse et accélération dans les coordonnées choisies.
6. Projeter les équations vectorielles sur les vecteurs de base puis travailler sur les expressions scalaires
selon les questions posées.
4 Un premier exemple de mouvement : la chute libre
La chute libre est le plus simple des problèmes mécaniques. On considère un corps ayant une certaine
masse et on le jette vers le haut. Comment décrire correctement son mouvement ?
4.1 Première approximation : la chute libre sans frottements
ILe poids
Nous avons vu qu’un corps de masse Mexerce sur un autre corps de masse mune force gravitationnelle.
Dans le cas de l’attraction gravitationnelle de la Terre sur un corps ponctuel, ou suffisamment petit pour
être considéré comme tel, la Terre exerce donc la force #”
FG=−mGMT
R2
T
#”
ezavec MTla masse de la Terre,
RTle rayon terrestre et #”
ezle vecteur vertical dirigé vers le haut.
Application 1 : Faire l’application du coefficient GMT/R2
Tet donner son unité. On prendra MT=
5.97 ×1024 kg,RT= 6370 km et G= 6.67 ×10−11 m3·kg−1·s−2.
5/14
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%