Mouvement Circulaire : Cours de Physique Lycée

Noguet Lycée Blaise Pascal Colmar Ch 4 Mouvement circulaire.doc 17/02/09 1/5
Chapitre 4 : Etude du mouvement circulaire
1.- Présentation du mouvement circulaire :
1.1.- Définition :
On dit qu’un point M est animé d’un mouvement circulaire par rapport à un repère R si sa trajectoire
est un cercle fixe dans R.
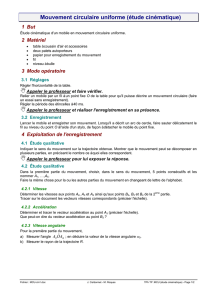
1.2.- Trajectoire du point mobile M dans le repère R :
A
O
M
A
AM
OM
θ
y
x
La position du point peut être définie dans le repère R :
- soit par les coordonnées paramétriques :
Ce sont les composantes de OM . Ces composantes dépendent ici, uniquement de l’angle θ. θ = f
(t) amènera à définir les caractéristiques angulaires du mouvement de M par rapport à R.
- soit par l’abscisse curviligne AM = s qui amènera à définir les caractéristiques linéaires du
mouvement de M par rapport à R.
2.- Caractéristiques angulaires du mouvement circulaire de M/R :
2.1.- Vecteur vitesse angulaire R/MΩ :
C’est un glisseur qui a pour caractéristiques :
o Support : axe de rotation
o Sens : direct (ire-bouchon)
o Module : R/MR/M ω=Ω
R/MΩ
∆
O
•
M
mv
t
R/M
ω est la vitesse angulaire algébrique en rad/s. Elle s’obtient en dérivant l’espace angulaire θ = f(t).
θ’ = où
R/M
ωdt
d
R/M
θ
=ω
θ
= espace angulaire

Noguet Lycée Blaise Pascal Colmar Ch 4 Mouvement circulaire.doc 17/02/09 2/5
Remarque : On peut exprimer en tr/min par la relation :
R/M
ω30
N.
R/M
π
=ω N en tr /mn
2.2.- Vecteur accélération angulaire 'R/MΩ :
C’est un glisseur qui a pour caractéristiques :
o Support :
axe de rotation
o Sens :
si son sens est identique à celui de R/MΩ alors
le mouvement est accéléré
si son sens est opposé à celui de R/MΩ alors le
mouvement est décéléré
Module :
''
dt
d
'R/M
'R/M
R/M θ=
ω
=ω=Ω en rad/s2
R/MΩ
R/M'Ω
Cas du mouvement décéléré
∆
O
•
M
mv
t
2.3.- Equations angulaires de mouvements circulaires particuliers
2.3.1.- Equations angulaires du mouvement circulaire uniforme (MCU)
θ+ω=θ =ω =ω
0t
cte
0'
2.3.2.- Equations angulaires du mouvement circulaire uniformément varié (MCUV)
θ+ω+ω=θ
ω+ω=ω =ω
0
0tt'
2
1t'
cte'
2
0
2.3.3.- Equation angulaire indépendante du temps :
En éliminant le paramètre t entre les deux dernières équations du MCUV, il vient : 2
0
2
0
'ω-ω=)θ-θ(ω2
3.- Caractéristiques linéaires du mouvement circulaire de M/R :
3.1.- Vecteur vitesse linéaire R/M
V :
C’est un pointeur qui a pour caractéristiques :
o Point d’application : le point M considéré
o Support : tangent à la trajectoire
du point M dans son
mouvement par rapport
à R au point M
o Sens : donné par le sens du
mouvement
o Module : R/MR/M vV =
R/MΩ
∆
mv
t
O
•
M
R/MV
R/M
V est la vitesse linéaire algébrique en m/s. Elle s’obtient en dérivant l’abscisse curviligne s par rapport
au temps.
Ainsi, dt
sd
vR/M = or sθ= donc R. dt
d
.R
s
dt
d
θ
= On avait posé : ω=
θ
dt
d
D’où : R.v R/MR/M ω= avec : = vitesse linéaire algébrique en m/s
R/M
v

Noguet Lycée Blaise Pascal Colmar Ch 4 Mouvement circulaire.doc 17/02/09 3/5
R/M
ω = vitesse angulaire algébrique en rad/s
R = rayon de la trajectoire en m
R/M
θ = espace angulaire en rad

Noguet Lycée Blaise Pascal Colmar Ch 4 Mouvement circulaire.doc 17/02/09 4/5
3.2.- Vecteur accélération linéaire a :
R/M
C’est un pointeur qui a pour caractéristiques :
o Point d’application :
le point M considéré
o Support de l’accélération tangentielle T
a :
tangent à la trajectoire du point M dans son
mouvement par rapport à R au point M
o Support de l’accélération normale N
a* :
Normale** à la trajectoire du point M dans son
mouvement par rapport à R au point M
o Sens de l’accélération tangentielle T
a :
- si son sens est identique à celui de R/MV alors
le mouvement est accéléré
si son sens est opposé à celui de R/MV alors le
mouvement est décéléré
o Sens de l’accélération normale N
a :
L’accélération normale est toujours dirigée
vers le centre de la courbure
o Module : 2
N
2
TR/MR/M aaaa +==
R/M
T
M
•
R/M
V
R/M
a
N
a
T
a
* L’accélération normale est aussi appelée accélération centripète.
** Normale à une courbe en un point = perpendiculaire à la tangente à la courbe en ce point.
Remarque importante :
Dans le cas général : N
)v(
T
dt
vd
aR/M
R/M
R/M
r
r
r⋅
ρ
+⋅=
2
Ici et ρ =R R.v R/MR/M ω=
D’où l’expression de l’accélération dans le cas particulier du mouvement circulaire :
N.R.T.R.a 2R/M
R/M
R/M
rr
rω+ω= •
où : ( représente la valeur algébrique de l’accélération tangentielle) R.a R/M
T
•
ω= T
a
et ( représente la valeur algébrique de l’accélération normale) R.a 2R/MN ω= N
a
3.3.- Equations linéaires de mouvements circulaires particuliers
2.3.1.- Equations linéaires du mouvement circulaire uniforme (MCU)
+=
==
0
T
stvs
ctev
0a
Attention : a
T = 0 mais aN = ω2R ≠ 0 car ω ≠ 0 ( R/M
V est variable en direction)
2.3.2.- Equations linéaires du mouvement circulaire uniformément varié (MCUV)
++ω=
+ω=
=
00
0
T
stvtR'
2
1
s
vtR'v
ctea
2
Attention : a
T = cte mais aN ω2R ≠ cte car ω ≠ cte ( R/M
V est variable en direction et en module)
4.- Relation entre vecteurs vitesse angulaire et linéaire :
Les vecteurs R/MΩ et R/M
V sont les éléments de réduction du torseur cinématique :

Noguet Lycée Blaise Pascal Colmar Ch 4 Mouvement circulaire.doc 17/02/09 5/5
{}
=
ω
ω
ω
=Ω
=
z
y
x
R/M
z
y
x
R/M
M
R/M
v
v
v
V
V =
ω
ω
ω
z
y
x
z
y
x
v
v
v
1
/
5
100%