RÉFÉRENTIELS NON GALILÉENS ( ) ( ) ( ) ( )

Q Référentiels non galiléens (33-209) Page 1 sur 15 JN Beury
RÉFÉRENTIELS NON GALILÉENS
I. FORCES D’INERTIE
I.1 Introduction des forces d’inertie et PFD dans un référentiel non galiléen
• Soit un point matériel M de masse m.
• Soient deux référentiels :
()
00123
,,,Eeeeℜ= GG G : référentiel galiléen et
(
)
,,,Oi jkℜ=
G
G
G référentiel non galiléen.
• Bilan des forces :
f
G = résultante des forces qui s’appliquent sur M
• On applique la PFD dans le référentiel galiléen 0
ℜ
:
(
)
0
ma M f
ℜ
=
G
G
La loi de composition des accélérations s’écrit :
(
)
(
)
(
)
(
)
0ec
aM aM a M a M
ℜℜ
=++
G
GGG
On obtient :
() () ()
()
ec
maM a M a M f
ℜ++ =
G
GGG , d’où
(
)
(
)
(
)
ec
ma M f ma M ma M
ℜ=− −
G
G
GG
On définit :
Force d’inertie d’entraînement =
()
(
)
ie e
fM maM=−
G
G
Force d’inertie de Coriolis =
()
(
)
ic c
fM maM=−
G
G
On peut donc écrire le PFD dans le référentiel non galiléen
ℜ
:
(
)
(
)()
ie ic
ma M f f M f M
ℜ=+ +
G
GG
G
Pour appliquer le PFD dans un référentiel non galiléen, il suffit de rajouter l’effet des forces d’inertie
d’entraînement et de Coriolis.
Toutes les vitesses, les accélérations, les travaux, les puissances seront calculés dans ℜ.
Par la suite, on notera v
G la vitesse dans ℜ et a
G
l’accélération dans
ℜ
.
On n’aura pas besoin de la vitesse dans 0
ℜ et de l’accélération dans 0
ℜ
.
On aura juste besoin de 0
ℜ pour calculer
(
)
(
)
ie e
fM maM=−
G
G
et
(
)
(
)
ic c
fM maM=−
G
G
.
L’ensemble des résultats de la mécanique newtonienne peut donc être utilisé dans un référentiel non galiléen à
condition d’ajouter les effets des forces d’inertie.
Vocabulaire :
f
G traduit des interactions, on dit que ce sont des forces « véritables » alors que ie
f
G et ic
f
G ne sont pas des
« forces véritables » car elles n’existent que dans les référentiels non galiléens. On dit que ce sont des « pseudo-forces ».
Cependant, on verra leurs effets dans ces référentiels et il est donc préférable d’éviter de dire que ie
f
G et ic
f
G sont des forces
fictives.
I.2 Théorème de l’énergie cinétique dans un référentiel non galiléen
D’après le paragraphe précédent, on peut appliquer le théorème de l’énergie cinétique dans ℜ non galiléen à condition
de rajouter le travail des forces d’inertie d’entraînement et de Coriolis.
d
ie ic
c
f
ff
EWWW
δδ δ
=++
G
GG
La puissance de la force de Coriolis est nécessairement calculée dans
ℜ
:
()() ()
()
()
0
/
2^
ic
PfMvM m vM vM
ω
ℜℜ
ℜℜℜ
=⋅=− ⋅
G
G
GGG
()
vMℜ
G est bien la vitesse relative puisque le référentiel absolu est 0
ℜ
.
On travaille uniquement dans le référentiel relatif. La vitesse relative
(
)
vM
ℜ
G
est notée v
G
.
On a alors
()
(
)
0
/
2^ 0
ic
PfMv m vv
ω
ℜℜ
=⋅=− ⋅=
GG
GGG
car
(
)
ic
fM v
⊥
G
G
.
La puissance de la force de Coriolis est nulle, donc le travail de la force de Coriolis est nul.
La force de Coriolis ne modifie donc pas le module de la vitesse mais dévie le vecteur vitesse.
I.3 Théorème du moment cinétique dans un référentiel non galiléen.
D’après le paragraphe précédent, on peut appliquer le théorème du moment cinétique dans ℜ non galiléen à condition
de rajouter le moment des forces d’inertie d’entraînement et de Coriolis.
Pour un point O fixe dans ℜ, on a :
() ( ) ( )
00 0
d
d
O
ie ic
ff f
t
σ
=Γ +Γ +Γ
G
G
GG
G
GG

Q Référentiels non galiléens (33-209) Page 2 sur 15 JN Beury
z
O
ω
t
M
H
1
e
G
2
e
G
k
G
i
G
j
G
z
O
ω
t
M
H
II. DEUX CAS PARTICULIERS IMPORTANTS
II.1 Référentiel en translation par rapport à un autre référentiel
• Soit un point matériel M de masse m
• Soient deux référentiels :
()
00
,,,Eijkℜ=
G
GG référentiel galiléen et
(
)
,,,Oi jkℜ=
G
G
G référentiel non galiléen.
ℜ est en translation par rapport à 0
ℜ, donc 0
/0
ω
ℜℜ
=
G
G
. On en déduit que
(
)
0
c
aM
=
G
G
et
() ()
0
e
aM aO
ℜ
=
GG
.
Si
()
00
,,,Eijkℜ= G
GG est en translation par rapport à
(
)
,,,Oi jkℜ=
G
G
G, alors :
(
)
(
)
0
ie
fM maO
ℜ
=−
G
G
(
)
0
ic
fM
=
G
G
Si
()
00
,,,Eijkℜ= G
GG est en translation rectiligne uniforme par rapport à
(
)
,,,Oi jkℜ= G
G
G, alors :
(
)
0
ie
fM
=
G
G
et
()
0
ic
fM=
GG. On retrouve bien le principe de relativité galiléenne.
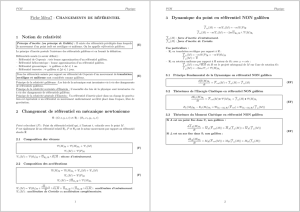
II.2 Référentiel en rotation uniforme autour d’un autre référentiel
On considère
()
012
,,,Oe e kℜ=
G
GG un référentiel en rotation uniforme par rapport à
(
)
,,,Oi jkℜ= G
GG autour de l’axe fixe
()
,Ok
G.
http://www.sciences.univ-nantes.fr/physique/perso/gtulloue/Meca/Cinematique/entrainement_rot.html
Exemple :
()
012
,,,Oe e kℜ= G
GG référentiel géocentrique et
(
)
,,,Oi jkℜ=
G
G
G référentiel
terrestre.
On note 0
/k
ω
ω
ℜℜ =G
Gavec cte
ω
=
.
a) Il y a une seule façon de calculer l’accélération de Coriolis :
(
)
0
/
2^
c
aM v
ω
ℜℜ
=
G
G
G.
On a vu que l’on note v
G la vitesse relative puisqu’on travaille exclusivement dans
le référentiel relatif
()
,,,Oi jkℜ= G
G
G.
b) Accélération d’entraînement : Le point coïncidant décrit un cercle de centre H,
de rayon HM avec H le projeté orthogonal de M sur l’axe Oz. Le point coïncidant
est un point collé au référentiel terrestre.
Le mouvement du point coïncidant est circulaire uniforme donc
(
)
2
e
aM HM
ω
=−
J
JJJG
G
et
()
2
ie
fM mHM
ω
=+
G
J
JJJG
()
,,,Oi jkℜ= G
GG est en rotation uniforme autour d’un axe fixe par rapport à
(
)
012
,,,Oe e kℜ= G
GG .
(
)
0
/
2^
ic
fM m v
ω
ℜℜ
=−
G
G
G
()
2
ie
fM mHM
ω
=+
G
J
JJJG : FORCE CENTRIFUGE
Interprétation physique : pour un mouvement circulaire, l’accélération est centripète dirigée vers le centre de rotation.
La force d’inertie d’entraînement est appelée force centrifuge et dirigée de H vers M : elle fuit le centre de rotation H.

Q Référentiels non galiléens (33-209) Page 3 sur 15 JN Beury
z
O
M
H
z
O
ω
t
M
H
1
e
G
2
e
G
k
G
i
G
j
Gk
G
i
G
j
G
z
O
M
H
k
G
i
G
j
Gm
H
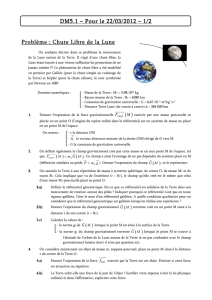
Remarque importante : On peut prendre n’importe quel point fixe par rapport à la terre comme origine du référentiel
terrestre. De même, on peut choisir n’importe quelle base orthonormée directe pour le référentiel terrestre à condition
que les vecteurs soient fixes par rapport à la Terre.
Par la suite, on ne s’intéressera qu’au mouvement relatif de M par rapport à la Terre.
Sur le schéma, on ne représentera que le référentiel
(
)
,,,Oi jkℜ=
G
G
G. On utilisera deux bases de projection :
coordonnées cartésiennes ou coordonnées cylindriques.
Sur le deuxième schéma, on a représenté uniquement
(
)
,,,Oi jkℜ=
G
G
G. Les autres vecteurs unitaires sont inutiles.
On arrive au schéma suivant :
Calculons l’énergie potentielle de la force centrifuge.
La méthode est de calculer le travail élémentaire :
d
ie
Wf l
δ
=⋅
GJJG.
1ère possibilité : On utilise la base des coordonnées cylindriques :
(
)
22
ie r
fM mHM mru
ωω
=+ =
G
JJJJG
G
et
dd d d
rz
lruruzu
θ
θ
=+ +
GGGG
2dd
p
Wmrr E
δω
==−
2ème possibilité :
(
)
(
)
22 2
ddd dd0d
ie z
W f OM m HM OH HM m HM zu HM m HM HM
δω ω ω
=⋅ = ⋅ + = ⋅ + =+ ⋅
G
J
JJJG JJJJG JJJJG JJJJG JJJJG JJJJG JJJJG JJJJG
G
2
2dd
2
p
HM
Wm E
δω
==−
, d’où
L’énergie potentielle de la force centrifuge vaut : 22
1
2
p
EmHMcte
ω
=− +

Q Référentiels non galiléens (33-209) Page 4 sur 15 JN Beury
θ
0
T
G
ie
f
G
P
G
'
P
G
M
O
α
r
u
G
u
α
G
'
P
G
T
G
O
E
0
M
θ
ℜ
0
ℜ
T
G
ie
f
G
P
G
()
0
aO ai
ℜ=G
G
i
G
j
G
k
G
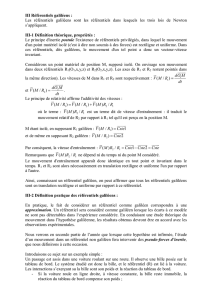
III. EXERCICE
On considère un pendule simple de longueur l accroché au plafond d’un camion animé d’un mouvement de translation et
uniformément accéléré. Déterminer la position d’équilibre de la masse m dans le camion et la période des petites
oscillations autour de cette position d’équilibre.
• Système = {Point matériel M de masse m}
• Référentiels :
()
00
,,,Eijkℜ= G
GG référentiel terrestre galiléen et
(
)
,,,Oi jkℜ=
G
G
G référentiel lié au camion.
• Bilan des forces :
¾ Poids : Pmg=
G
G
¾ Tension du fil : r
TTu=−
GG
¾
() () ()
0
ie e
f
MmaMmaO mai
ℜ
=− =− =−
G
G
G
G
¾
()
0
/
2^0
ic
fM m v
ω
ℜℜ
=− =
GG
GG car
ℜ
est en translation par rapport à 0
ℜ
.
• PFD dans ℜ : ie ic
ma P T f f=++ +
GG
G
G
G
À l’équilibre de la masse m par rapport au camion : 0ie
PT f
=
++
G
G
G
G
On en déduit 0
tan ma a
mg g
θ
==
On obtient ainsi l’inclinaison par rapport à la verticale de la direction d’équilibre du fil.
• PFD dans ℜ : ie ic
ma P T f f=++ +
GG
G
G
G
On fait un changement de variable : 0
θ
θα
=+
On pose ''
ie
PPf mg=+ =
G
GG G = poids apparent.
Le PFD s’écrit : 'ma P T=+
GG
G
On projette sur la base
()
,
r
uu
α
GG :
ml
()
2'cos
2
lTmg
ml
α
α
−=−+
()
'sinlmg
α
αα
+=−
La projection sur u
α
G donne l’équation différentielle du mouvement : 'sin 0
g
l
αα
+
=
Si 1
α
, alors '0
g
l
αα
+=
. On pose 0
0
'2g
lT
π
ω
==
, d’où 02'
l
T
g
π
=

Q Référentiels non galiléens (33-209) Page 5 sur 15 JN Beury
IV. PFD DANS LE RÉFÉRENTIEL GÉOCENTRIQUE
IV.1 PFD dans le référentiel géocentrique
a) Présentation des deux référentiels
• Soit M un point matériel.
• On considère deux référentiels :
(
)
0,,,Si jkℜ=
G
G
G référentiel de Copernic galiléen et
()
,,,Ti jkℜ= G
GG référentiel
géocentrique non galiléen.
ℜ est en translation par rapport à 0
ℜ : 0
/0
ω
ℜℜ
=
G
G
b) Accélération d’entraînement du point M
L’accélération d’entraînement de m vaut :
(
)
(
)
0
e
aM aT
ℜ
=
G
G. Pour calculer l’accélération du point T dans le
référentiel de Copernic, il faut étudier le mouvement de la Terre autour du Soleil :
• Système = {Terre de masse MT}
• Référentiel de Copernic :
()
0,,,Si jkℜ=
G
GG galiléen
• Bilan des forces extérieures qui s’exercent sur la Terre : force exercée par tous les autres astres autres que la
Terre (Soleil, Lune, planètes…)
()
22
...
SL
Ta T ST LT
GM GM
MA T M u u
ST LT
→→
−−
=−+
GGG
en considérant la Terre et le Soleil à symétrie sphérique ce qui revient à les assimiler à des points matériels.
• Théorème de la quantité de mouvement à la Terre :
(
)
(
)
0
TTa
M
aT MA T
ℜ=
G
G
.
On en déduit donc l’accélération d’entraînement :
(
)
(
)
(
)
0
ea
aM aT AT
ℜ
==
G
G
G
c) PFD dans le référentiel géocentrique non galiléen
• Système = {point matériel M de masse m}
• Référentiels :
(
)
0,,,Si jkℜ= G
GG référentiel de Copernic galiléen et
(
)
,,,Ti jkℜ=
G
G
G référentiel géocentrique non
galiléen.
• Bilan des forces :
¾ Force de gravitation exercée par la Terre :
()
2
T
TTM
GM
mA M m u
TM →
−
=
G
G
¾ Force de gravitation dûe aux autres astres que la Terre (Soleil ,Lune…) :
()
22
...
SL
aSMLM
GM GM
mA M m u u
SM LM
→→
−−
=++
GGG
¾
f
G : autres forces appliquées que les forces de gravitation (exemple : tension d’un fil...)
¾
() () ()
ie e a
fM maM mAT=− =−
GG
G
¾
()
0
ic
fM=
GG car ℜ est en translation par rapport à 0
ℜ
.
• PFD :
() () ()
(
)
(
)
T a ie ic
ma M mA M mA M f f M f M
ℜ=++++
G
GG
G
G
G.
On obtient :
() () () ()
Taa
ma M mA M f m A M A T
ℜ
=++ −
G
GGG
G
On pose
() () () ()
aa a
A
MAT AMCM
−=∆=
GG G G
= champ de marée.
Pour passer du référentiel de Copernic galiléen au référentiel géocentrique, il faut donc ajouter le terme de
marée :
() ()
aa
mA M AT
−
GG
.
Conséquence :
¾ contribution du soleil :
()
11 30
32
2
29
6,67 10 2 10 610 m.s
150 10
S
soleil
GM
ATS
−
−
−
×××
== =×
×
¾ contribution de la lune :
()
24
11
52
2
23
610
6,67 10 81 3, 4 10 m.s
380000 10
L
lune
GM
ATL
−
−
−
×
××
== =×
×
¾ en un point de la surface de la Terre : 72
510 m.s
soleil
C
−
−
=× (voir calculs dans le prochain paragraphe)
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%