Cours de physique 1° S

Cours de physique 1° S - Chapitre B3 :
LOIS DE NEWTON
1. Référentiels galiléens
1.1. Définition
On appelle référentiel galiléen, un référentiel dans lequel le principe d'inertie, dont on
rappellera l'énoncé au paragraphe suivant, est vérifié.
1.2. Exemples
Le référentiel héliocentrique (pour étudier le mouvement des planètes), le référentiel
géocentrique (pour étudier le mouvement de révolution de la Lune autour de la Terre
et le mouvement des satellites artificiels de la Terre) et le référentiel terrestre (pour
étudier les mouvements localisés à la surface de la Terre) peuvent être considérés comme
galiléens (doc 6 p 74).
1.3. Autres référentiels galiléens
Un référentiel animé d'un mouvement de translation rectiligne uniforme par rapport à un
référentiel galiléen est lui-même galiléen.
Exemple : la cabine d'un ascenseur est un référentiel galiléen à condition qu'elle se déplace à
vitesse constante (entre deux étages).
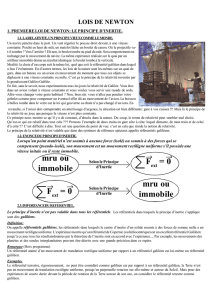
2. Principe d'inertie (première loi de Newton)
Dans un référentiel galiléen, le centre d'inertie G d'un système isolé (soumis à aucune force
extérieure) ou pseudo isolé (soumis à un ensemble de forces extérieures dont la résultante
est nulle :
0F
) est soit au repos (
0v
), soit animé d'un mouvement rectiligne uniforme
(
ctev
).
Remarque :
Le principe d'inertie ne concerne que le mouvement du centre d'inertie G du système. Ses
autres points peuvent avoir un mouvement plus complexe (cf TP étude cinématique d'un
mouvement).

2. Deuxième loi de Newton
Dans un référentiel galiléen, si le vecteur vitesse
v
du centre d'inertie G d'un solide varie, la
somme (ou résultante)
F
des forces qui s'exercent sur le solide n'est pas nulle
0F
. La
direction et le sens du vecteur
F
, à un instant t donné, sont ceux de la variation du
vecteur vitesse
)()( tvttvv
au même instant.
Remarques :
l'énoncé de la deuxième loi de Newton est incomplet car la relation entre
F
, et
v
n'a pas été établie. Il sera complété en terminale S.
Le principe d'inertie est un cas particulier de la deuxième loi de Newton. En effet, si
0F
alors
ctev
ou
0v
, donc
0v
.
4. Principe des interactions (troisième loi de Newton)
Lorsqu'un corps A exerce sur un corps B, une action mécanique modélisée par une force
BA
F/
,
alors, simultanément, le corps B exerce sur le corps A, une action mécanique modélisée par
une force
AB
F/
.
Les forces
BA
F/
et
AB
F/
sont opposées :
AB
F/
= -
BA
F/
Elles ont même droite d'action, même intensité FB/A = FA/B, mais sont de sens opposés.
Cette loi est universelle ; elle est valable dans tous les référentiels (galiléens ou non
galiléens), quelle que soit la nature de l'interaction et que A et B soient immobiles ou en
mouvement.
1
/
2
100%