Rotations définies comme composées de réflexions

Rotations d´efinies comme compos´ees de r´eflexions
Notes pour la pr´eparation `a l’oral du CAPES - Strasbourg - Novembre 2006
La m´ethode la plus ´economique pour d´efinir une rotation consiste `a dire que c’est une isom´etrie
dont l’application lin´eaire associ´ee admet un d´eterminant (qui ne d´epend du choix de la base)
positif. C’est une m´ethode qui n’est pas abordable en lyc´ee.
La fa¸con traditionnelle d’introduire les rotations au lyc´ee consiste `a les d´efinir par leur centre
et leur angle. Pour que ceci ne repose pas sur une id´ee intuitive de la notion d’angle orient´e,
il faudrait pr´ealablement d´efinir au moins l’´egalit´e de deux angles orient´es de vecteurs et cela
demande d’utiliser des rotations. En effet les angles de vecteurs unitaires (−→
u , −→
v) et (−→
u′,−→
v′)
sont ´egaux s’il existe une rotation qui envoie −→
usur −→
u′et −→
vsur −→
v′. On se trouve alors devant
un cercle vicieux.
L’objectif de ce texte est de montrer comment on peut d´efinir les rotations du plan affine
euclidien comme compos´ees de r´eflexions.
Nous supposerons acquise la notion de m´ediatrice :
L’ensemble des points ´equidistants de deux points distincts Aet Best une droite, appel´ee
m´ediatrice de AB.
Et nous supposerons connues les propri´et´es ´el´ementaires des r´eflexions s∆d’axe ∆ :
(i) l’ensemble des points fixes de s∆est ´egal `a la droite ∆;
(ii) ∆est la m´ediatrice d’un point M6∈ ∆et de son image par s∆;
(iii) s∆est involutive c’est-`a-dire s∆◦s∆= Id ;
(iv) s∆est une isom´etrie.
On rappelle qu’une isom´etrie est d´efinie comme une application du plan affine euclidien dans
lui-mˆeme qui conserve les distances.
1. Isom´
etries ayant au moins un point fixe
Les propri´et´es rappel´ees ci-dessus suffisent `a classifier les isom´etries du plan euclidien qui
admettent au moins un point fixe.
Lemme 1.1. Soit fune isom´etrie. Alors fest l’identit´e si et seulement si fadmet (au moins)
trois points fixes non align´es
D´emonstration. — Si fest l’identit´e elle admet tous les points du plan comme points fixes.
Supposons donc que fadmet trois points fixes A,Bet Cnon align´es. Si l’image par fd’un
point Mdu plan est distincte de Malors les points A,Bet Cappartiennent tous les trois
`a la m´ediatrice de M f (M), puisque que fconserve les distances. Ceci qui impossible car les
points A,Bet Cne sont pas align´es. Par cons´equent fest l’identit´e puisque tous les points
du plan sont fix´es par f.
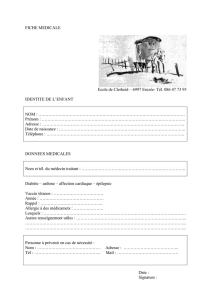
Lemme 1.2. Soit fune isom´etrie. Alors fest une r´eflexion si et seulement si fadmet (au
moins) deux points fixes et si fn’est pas l’identit´e.
D´emonstration. — La condition n´ecessaire est ´evidente, montrons la r´eciproque.

2Nicole Bopp
Soient Aet Bdeux points fixes distincts de
f. Tous les points de la droite (AB) sont fix´es
par f(ils sont caract´eris´es par la somme ou la
diff´erence de leurs distances `a Aet B). Comme
fest distincte de l’identit´e il existe un point
Mdu plan n’appartenant pas `a (AB) tel que
Met f(M) sont distincts. La m´ediatrice ∆ de
M f (M) contient les points Aet B.
Or l’application s∆◦fadmet pour points fixes A,
Bet M. C’est donc l’identit´e (d’apr`es le lemme
1.1) ce qui implique que f=s∆.f(M)
M
B
A
Lemme 1.3. Soit fune isom´etrie. Alors fadmet un seul point fixe Osi et seulement si fest
la compos´ee de deux r´eflexions d’axes s´ecants en O
D´emonstration. —
C.N. Supposons que fest une isom´etrie qui ad-
met Opour seul point fixe.
Soit Aun point distinct de O. Son image par f
est distincte de A. La m´ediatrice ∆ de Af (A)
passe par Oet s∆◦fadmet Oet Apour points
fixes.
Si c’est l’identit´e, fserait ´egale `a s∆et aurait
plus d’un point fixe, ce qui est impossible.
Par cons´equent (d’apr`es le lemme 1.2) s∆◦fest
la r´eflexion d’axe (OA) qui est bien s´ecant avec
∆ en Oce qui s’´ecrit f=s∆◦s(OA).
O
A
∆
f(A)
C.S. Soient ∆ et ∆′deux droites s´ecantes en O
et fl’isom´etrie d´efinie par f=s∆′◦s∆.
Supposons que fadmet un point fixe Adistinct
de Oet notons A′l’image de Apar s∆. Alors ∆
est la m´ediatrice de AA′. Mais comme, d’autre
part, Aest l’image par s∆′de A′, ∆′est aussi la
m´ediatrice de AA′. Ceci implique que les droites
∆ et ∆′sont confondues, ce qui est contraire `a
l’hypoth`ese. Par cons´equent Oest le seul point
fixe de f.
O
A
A′
∆
∆′
A
Definition 1.4. On appelle rotation de centre Ola compos´ee de deux r´eflexions d’axes s´ecants
en O.
Exemple. — Une sym´etrie centrale de centre O(c’est-`a-dire une homoth´etie de centre Oet de
rapport −1) est une rotation.

Rotations d´
efinies comme compos´
ees de r´
eflexions 3
En effet c’est la compos´ee de deux r´eflexions
d’axes orthogonaux s´ecants en O.
MM′
M′′
O
Nous avons donc obtenu une classification des isom´etries ayant au moins un point fixe que
l’on peut r´esumer dans le tableau ci-dessous :
Ensemble des points fixes Isom´etrie
Plan Identit´e
Droite ∆ R´eflexion d’axe ∆
Point ORotation de centre O
2. Les isom´
etries ayant pour point fixe O
Ce paragraphe va nous permettre de comprendre un peu mieux les rotations. On peut com-
mencer par remarquer que l’ensemble des isom´etries qui admettent Opour point fixe est un
sous-groupe du groupe des isom´etries.
Proposition 2.1. Soient Det ∆deux droites s´ecantes en O. Alors on a
(1) sD◦s∆=s∆◦sD′o`u D′=s∆(D) ;
(2) Les r´eflexions sDet s∆commutent si et seulement si Det ∆sont orthogonales.
D´emonstration. — Soit Aun point de Ddistinct de Oet A′son image par s∆. Comme Det
∆ sont distinctes les points Aet A′sont distincts.
(1) Soit D′l’image par s∆de la droite Dc’est-
`a-dire la droite (OA′).
L’image par f=sD◦s∆de A′est le point Aet
l’image par g=s∆◦sD′de A′est aussi le point
A.
Par cons´equent g−1◦fadmet pour points fixes
Oet A′.
Si c’est la r´eflexion d’axe (OA′) = D′, alors on a
f=g◦sD′=s∆,
ce qui est impossible car fadmet un seul point
fixe.
Donc g−1◦fest l’identit´e ce qui implique
l’´egalit´e de fet g.
O
A
A′
D
∆
D′
A′=s∆(A)
(2) Si s∆et sDcommutent on obtient sD(A′) = s∆(A) = A′. Ceci implique que A′appartient
`a Det donc que ∆, qui est la m´ediatrice de AA′, est orthogonale `a D. R´eciproquement, on a
d´ej`a vu que si ∆ et Dsont orthogonales et s´ecantes en Oalors la sym´etrie centrale de centre
Oest ´egale `a sD◦s∆et `a s∆◦sD.

4Nicole Bopp
Proposition 2.2. Soient fune rotation de centre Oet ∆est une droite passant par O. Alors
s∆◦fet f◦s∆sont des r´eflexions dont l’axe passe par O.
D´emonstration. — Nous allons faire la d´emonstration pour s∆◦f. Par d´efinition fest ´egale
`a sD1◦sD2o`u les droites D1et D2sont s´ecantes en O. Choisissons un point Adistinct de O
sur le droite D2et posons A′=s∆◦f(A).
1) Si Aet A′sont confondus alors s∆◦fadmet deux points fixes, `a savoir Oet A. Si s∆◦f
est l’identit´e alors fest une r´eflexion ce qui est impossible car fn’admet qu’un seul point
fixe. Par cons´equent s∆◦fest la r´eflexion d’axe (OA).
2) Si Aet A′sont distincts on consid`ere la
m´ediatrice ∆′de AA′. Elle passe par Oet
l’isom´etrie s∆′◦s∆◦fadmet deux points
fixes, `a savoir Oet A. Si cette isom´etrie
est une r´eflexion, c’est n´ecessairement la
r´eflexion d’axe (OA) c’est-`a-dire sD2. On
a alors
s∆′◦s∆◦f=sD2
ce qui implique
s∆◦sD1=s∆′.
Or ceci est impossible.
Par cons´equent s∆′◦s∆◦fest l’identit´e,
ce qui implique que s∆◦fest la r´eflexion
d’axe ∆′.
A
A′
O
D1
D2
f(A)
∆∆′
Une cons´equence directe et fort utile de cette proposition est le
Corollaire 2.3. Si fest une rotation de centre Oon peut l’´ecrire comme produit de deux
r´eflexions d’axes s´ecants en O, l’un des axes ´etant choisi arbitrairement.
Theor`eme 2.4. L’ensemble des rotations de centre Oauquel on a adjoint l’identit´e est un groupe
commutatif 1.
D´emonstration. — Pour montrer que le produit de deux rotations r1et r2de centre Oest une
rotation (ou l’identit´e), il suffit de choisir une droite ∆ passant par Oet d’´ecrire r1=sD1◦s∆
et r2=s∆◦sD2en utilisant la proposition 2.2. On en d´eduit que r1◦r2=sD1◦sD2. Ceci
implique que r1◦r2est une rotation si les droites D1et D2sont distinctes et l’identit´e si elles
sont confondues. Cette proc´edure est tr`es utile pour ´etudier la composition de deux rotations.
De plus l’inverse de la rotation sD1◦sD2est la rotation sD2◦sD1. L’ensemble des rotations
de centre Oest bien un groupe.
Reste `a montrer que deux rotations r1et r2de centre Ocommutent.
(1) Si r2◦r1est l’identit´e alors r1◦r2◦r1=r1ce qui implique, puisqu’une isom´etrie est une
bijection, que r1◦r2est aussi l’identit´e.
1C’est pourquoi on ´etend la d´efinition des rotations en consid´erant que l’identit´e est aussi une rotation ....
et que tout point du plan peut ˆetre consid´er´e comme ´etant son centre.

Rotations d´
efinies comme compos´
ees de r´
eflexions 5
(2) Si ce n’est pas le cas il existe un point Mdistinct de Odont l’image M′par r2◦r1est
distincte de M.
On consid`ere la m´ediatrice ∆ de M M′qui
passe par O. D’apr`es la Proposition 2.2 on
peut alors ´ecrire
r1=s∆◦sD1et r2=sD2◦s∆,
o`u D1et D2sont des droites passant par
Odistinctes de ∆. On a donc
M′=r2◦r1(M) = sD2◦sD1(M),
ce qui implique que sD2(M′) = sD1(M).
On a alors
r1◦r2(M) = s∆◦sD1◦sD2◦s∆(M)
=s∆◦sD1◦sD2(M′)
=s∆◦sD1◦sD1(M)
=s∆(M)
=M′.
O
M
M′
D2
D1
∆
M′=r2◦r1(M)
On en d´eduit que (r2◦r1)−1◦(r1◦r2), qui est une rotation ou l’identit´e, admet deux points
fixes. C’est donc l’identit´e d’o`u l’´egalite de r2◦r1et de r1◦r2c’est-`a-dire la commutativit´e
du groupe.
La d´emonstration qui est donn´ee ici de la commutativit´e des rotations de mˆeme centre est un
peu d´elicate mais elle ne repose que sur les propri´et´es des r´eflexions.
Remarque. — On rappelle qu’une isom´etrie est une application affine. Si on note Gle groupe
des isom´etries , −→
Gle groupe des applications lin´eaires associ´ees et Tle groupe des translations,
on a alors la suite exacte
1→ T → G→−→
G→1.
Ceci signifie que l’application de Gdans −→
Gqui `a fassocie −→
fest un morphisme de groupe
surjectif qui a pour noyau T. De plus pour tout point Odu plan le groupe GOdes isom´etries
ayant Opour point fixe est isomorphe au groupe −→
G. En effet, on peut v´erifier que l’application
de GOdans −→
Gqui `a fassocie −→
fest injective et surjective (le faire). On peut donc d´eduire du
th´eor`eme 2.4 que le groupe des rotations vectorielles est commutatif. Ce r´esultat est essentiel
pour d´efinir les angles orient´es de vecteurs.
1
/
5
100%





![Correction du contrôle 1 Exercice 1 Déterminer {P ∈ C[X]|P(X + Y](http://s1.studylibfr.com/store/data/000668475_1-de9a478e27b659684e95ea90036c0b1b-300x300.png)

