POSTULATS DE LA DYNAMIQUE NEWTONIENNE ( ) ( )

Q Postulats de la dynamique newtonienne (33-106) Page 1 sur 13 JN Beury
g
G
0
v
G
O
α
x
z
y
POSTULATS DE LA DYNAMIQUE NEWTONIENNE
I. ÉNONCÉ DU POSTULAT DYNAMIQUE NEWTONIEN
Il existe au moins un référentiel
ℜ
, dit galiléen, dans lequel le mouvement d’un point matériel de vitesse v
G peut être décrit
par la loi : d
d
v
F
mma
tℜ
==
G
GG.
Celle loi constitue la loi de la dynamique newtonienne ou relation fondamentale de la dynamique (RFD) ou principe
fondamental de la dynamique (PFD) ou 2ème loi de Newton.
¾ En mécanique classique, on postule que m est une grandeur scalaire positive caractéristique de la particule appelée
sa masse (ou masse inertielle). Elle se mesure en kg.
¾
F
G décrit les actions subies par la particule du fait de son environnement, elle est appelée force exercée sur la
particule.
F
G est un invariant en mécanique classique (ne dépend pas du référentiel). On postule l’additivité des
forces.
II. EXEMPLES, CONDITIONS INITIALES
II.1 Point matériel soumis à une force nulle
• Système = Point matériel M de masse m
• Référentiel
()
,,,Oi jkℜ= G
G
G galiléen.
• Bilan des forces : 0F
=
G
G
• PFD : 0ma =G
G,
Méthode 1 : intégrer l’équation différentielle en gardant les vecteurs : d
d
OM
vActe
t
===
J
JJJGJJG
G
G et OM At B=+
JJJJGG
G
.
Méthode 2 : projeter et intégrer les projections :
0
0
0
x
y
z
=
=
=
, donc
x
y
z
x
A
yA
zA
=
=
=
et
xx
yy
z
z
x
At B
yAtB
zAtB
=+
=
+
=+
Le principe fondamental de la dynamique ne suffit pas à déterminer complètement le mouvement. Il est nécessaire
de préciser les valeurs de OM
JJJJG et v
G à un instant donné (par exemple à t = 0), c'est-à-dire préciser les conditions
initiales.
Supposons qu’à t = 0 : M = M0 et 0
vv=
GG
. On a alors : 0
A
OM=
J
JJJJG
G
et 0
vv
=
G
G, soit 00
OM v t OM=+
J
JJJG JJJJJG
G.
On a donc un mouvement rectiligne uniforme (droite passant par M0 et parallèle à 0
v
G
)
Dans un référentiel galiléen, 0a=⇔
G
G le point M a un mouvement rectiligne uniforme.
Si le système n’est soumis à aucune force, on dit que le système est isolé.
Si le système est soumis à un ensemble de forces tel que 0F
=
G
G
, on dit que le système est pseudo-isolé.
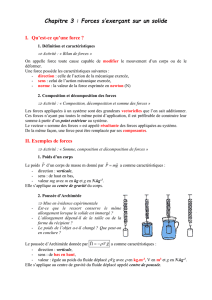
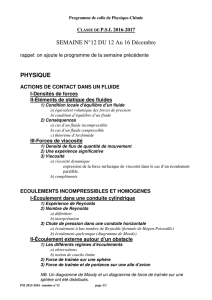
II.2 Point matériel soumis à une force constante
On prend l’exemple d’un point M soumis au champ de pesanteur uniforme.
On suppose qu’à t = 0 : M = O et 0
vv=
GG
(voir schéma).
• Système = Point matériel M de masse m
• Référentiel terrestre
()
,,,Oi jkℜ= G
GG galiléen.
• Bilan des forces : poids Pmgcte==
JJG
GG
• PFD : ma mg=
GG
donc ag=
GG
. On utilise les coordonnées cartésiennes.
0
0
x
y
zg
=
=
=−
, donc
x
y
z
xA
yA
zgtA
=
=
=− +

Q Postulats de la dynamique newtonienne (33-106) Page 2 sur 13 JN Beury
O
M
θ
R
x
y
r
u
G
u
θ
G
Or à t = 0,
0
0
0
cos
0
sin
v
v
v
α
α
G. On a donc
0
0
cos
0
sin
xv
y
zgtv
α
α
=
=
=− +
.
On intègre encore une fois : attention, cela revient à une séparation des variables : 0
dsin
d
zgt v
t
α
=− + , d’où
0
ddsindzgttv t
α
=− + et 2
0
1sin
2
zgtvt cte
α
=− + +
On obtient :
0
2
0
cos
1sin
2
x
y
z
xvt B
yB
zgtvt B
α
α
=+
=
=− + +
. Or à t = 0, M = O, d’où
Équations horaires :
0
2
0
cos
1sin
2
y
xvt
yB
zgtvt
α
α
=
=
=− +
Pour obtenir l’équation de la trajectoire, il faut éliminer t :
0cos
x
tv
α
=,
d’où
2
0
00
1sin
2cos cos
xx
zg v
vv
α
αα
=− +
, soit
2
22
0
1tan
2cos
x
zg x
v
α
α
=− +
• La trajectoire est une parabole dans le
plan contenant 0
v
G et
F
G.
• On peut chercher la portée, c'est-à-dire
l’abscisse pour laquelle z = 0, on a
2
22
0
1
0tan
2cos
x
gx
v
α
α
=− + , soit
222 2
00 0
2tancos 2sin cos sin2
p
vv v
xgg g
αα
α
αα
===
La portée est maximale pour 4
π
α
=.
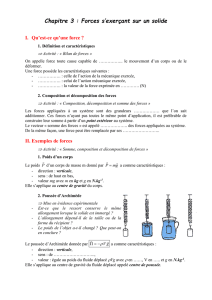
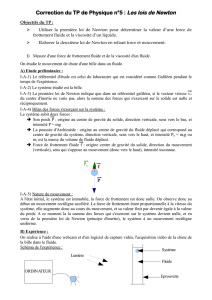
II.3 Mouvement circulaire uniforme
On prend l’exemple d’un point M (satellite) soumis à la force de gravitation terrestre.
• Système = Satellite assimilé à un point matériel M de masse m
• Référentiel
()
,,,Oi jkℜ= G
G
G géocentrique galiléen (voir paragraphe suivant
pour la définition du référentiel géocentrique).
• Bilan des forces : 2
T
OM
GM m
Fu
OM →
−
=
G
G
• PFD : 2
T
OM
GM m
ma u
OM →
−
=
GG
. On projette le PFD dans la base des
coordonnées cylindriques. On a vu que pour un mouvement circulaire
uniforme,
2
r
v
au
R
−
=
GG
.
On obtient immédiatement dans la base
(
)
,
r
uu
θ
G
G :
2
2
00
T
GM m
mv
RR
−
−=
=

Q Postulats de la dynamique newtonienne (33-106) Page 3 sur 13 JN Beury
T
S
T
Soleil
Terre
i
G
i
G
j
G
j
G
k
G
k
G
D’où
2
2
T
GM
v
RR
= et T
GM
vR
=
On donne souvent le champ de pesanteur terrestre au niveau du sol et le rayon terrestre : 02
T
T
GM
gR
=
avec g0 = 9,81 m.s-2 = champ de pesanteur terrestre au niveau du sol
G =constante de gravitation universelle = 6,67×10–11 N·m2·kg–2
MT = masse de la terre = 2×1030 kg
RT = rayon de la terre = 6400 km
On a donc 2
0TT
GM g R= et
2
0T
g
R
vR
=
III. EXEMPLES DE RÉFÉRENTIELS GALILÉENS
III.1 À la recherche d’un référentiel galiléen
Un référentiel est galiléen est un référentiel dans lequel le mouvement d’un point matériel peut être décrit par le
PFD.
Pour tester si un référentiel est galiléen, on fait une expérience. S’il n’y a pas de contradiction entre l’expérience et la
théorie, on peut conclure que le référentiel est galiléen.
On verra plus tard comment cela se traduit si le référentiel n’est pas galiléen. Il faudra rajouter les effets des forces
d’inertie d’entraînement et de Coriolis.
III.2 Référentiel de Copernic
Origine du référentiel de Copernic : centre d’inertie du système solaire
Trois axes issus du centre d’inertie et dirigés vers des « étoiles fixes ».
Les étoiles situées en dehors de notre galaxie sont si éloignées que leurs écarts angulaires
peuvent être considérés comme constants sur des durées extrêmement étendues, c’est en
ce sens que l’on peut parler d’étoiles fixes. De plus, les étoiles sont si nombreuses que
l’on peut considérer que sur n’importe quelle direction issue d’un point du système
solaire, on peut en rencontrer une.
Soit S le centre d’inertie du système solaire. Il existe trois étoiles E1, E2, E3 tells que les
axes 1
SE
JJJG , 2
SE
JJJG et 3
SE
JJJG soient deux à deux orthogonaux.
Le référentiel de Copernic est un excellent référentiel galiléen.
On utilise parfois le référentiel héliocentrique ou référentiel de Kepler : origine :
centre d’inertie du soleil et les axes sont parallèles aux axes du référentiel de Copernic.
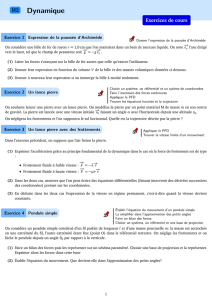
III.3 Référentiel géocentrique
Le plan de la trajectoire de la Terre autour du Soleil est le plan de l’Ecliptique.
S
E
1
E
2
E
3
i
Gj
G
k
G

Q Postulats de la dynamique newtonienne (33-106) Page 4 sur 13 JN Beury
M
1
M
2
21
F
→
G
12
F
→
G
Origine du référentiel géocentrique : centre d’inertie de la Terre
Trois axes issus du centre d’inertie et dirigés vers des « étoiles fixes ».
Le référentiel géocentrique est donc en translation par rapport au référentiel de Copernic.
L’orbite de la Terre par rapport au soleil est quasiment circulaire de rayon 150 millions de kilomètres. Si l’arc décrit est
peu grand, on peut l’assimiler à un morceau de tangente et on a un mouvement quasiment rectiligne uniforme.
Le mouvement de la Terre par rapport au référentiel de Copernic n’est pas rectiligne uniforme, cependant le référentiel
géocentrique s’avère être un très bon référentiel galiléen.
Dans tous les exercices (sauf celui sur les marées - voir cours sur les référentiels non galiléens), on pourra
considérer que le référentiel géocentrique est galiléen : voir exercice précédent avec satellite en orbite circulaire
uniforme autour de la terre.
III.4 Référentiel terrestre
Par rapport au référentiel de Copernic, la terre a un mouvement en rotation autour d’un axe appelé axe des pôles
(mouvement diurne) et un mouvement de translation du barycentre de la Terre autour du soleil (mouvement annuel).
Ces deux mouvements font qu’en toute rigueur, le référentiel terrestre n’est pas galiléen.
Origine du référentiel terre : un point quelconque de la Terre
Trois axes fixes par rapport à la Terre.
On verra qu’en première approximation, sur de nombreuses expériences à la surface de la terre (voir exercice
précédent de chute libre), le référentiel terrestre peut être considéré comme galiléen.
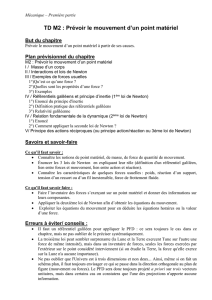
IV. PRINCIPE DES ACTIONS RÉCIPROQUES
On considère deux points matériels en interaction. La force que le point M1 exerce sur le point matériel M2 est notée 12
F
→
G
.
Le principe des actions réciproques stipule que le point M2 exerce sur le point M1 une force 21
F
→
G telle que ces deux forces
sont opposées et ont pour support la droite joignant ces points.
Principe des actions réciproques ou troisième loi de Newton
21 12
F
F
→→
=−
GG
et 12 12
^0MM F
→
=
J
JJJJJG
G
G
Exercice : On considère un point matériel en équilibre sur une table. Quelle est la force réciproque du poids ?
Correction : L’erreur à ne pas commettre est de dire que la force réciproque du poids est la réaction du support. C’est
faux. On verra la définition du poids : terme gravitationnel prépondérant + terme centrifuge très faible (voir chapitre sur
les référentiels non galiléens). On suppose la terre à symétrie sphérique. La résultante des forces de gravitation est
équivalente à une force unique créé par T le centre d’inertie de la terre affecté de la masse MT masse totale de la Terre.
On a donc une interaction entre deux points matériels M1 = T et M2 = M.
La force réciproque du poids est donc P−G force qui s’applique au centre d’inertie de la Terre !
La force réciproque du poids n’est donc pas la réaction du support qui s’applique au contact entre le support et M.
V. LES LOIS DE NEWTON
Dans les principia en 1687, Newton fonde sa mécanique sur trois lois :
1ère loi de Newton : « Principe d’inertie » : Il existe des référentiels, dits inertiels (ou galiléens) dans lesquels un point
matériel libre de toute interaction est animé d’un mouvement rectiligne et uniforme.
2ème loi de Newton : « Principe fondamental de la dynamique » (PFD) : Dans un référentiel galiléen, l’accélération a
G
d’un
point de masse m et soumis à
F
∑G est donnée par la relation
F
ma=
∑
G
G
3ème loi de Newton : « Principe des actions réciproques » : Les forces d’interaction réciproques qui s’exercent entre deux
points matériels sont opposées et ont pour support la droite joignant ces points.
21 12
F
F
→→
=−
GG
et 12 12
^0MM F
→
=
J
JJJJJG
G
G

Q Postulats de la dynamique newtonienne (33-106) Page 5 sur 13 JN Beury
12
u→
G
m
2
r
m
1
12
F
→
G
q
2
r
q
1
12
F
→
G
VI. EXEMPLES DE FORCES
VI.1 Les interactions fondamentales
a) Interaction gravitationnelle
On considère deux masses m1 et m2. La masse m1 exerce une force attractive sur la
masse m2. D’après le principe des actions réciproques, la masse m2 exerce une force
attractive sur m1.
Force d’interaction gravitationnelle ou d’attraction gravitationnelle : 12
12 12
2
Gm m
F
u
r
→→
−
=
G
G
• force en 1/r2.
• force attractive.
• portée infinie
m1 et m2 sont des masses gravitationnelles. L’expérience montre qu’elles peuvent être identifiées aux masses
inertielles. Il y a identité de la masse inertielle et de la masse gravitationnelle. On l’appellera masse par la suite.
G est la constante de gravitation universelle : 11 2 2
6,67 10 N kg mG−−
=
×⋅⋅
Voir exercice sur les satellites au paragraphe II.3.
On donne souvent le champ de pesanteur au niveau du sol : g0 = 9,81 m.s-2.
MT désigne la masse de la terre et RT le rayon de la terre : 02
T
T
GM
gR
= avec RT = 6400 km et MT = 6×1024 kg.
Parfois, on met m2 en facteur, on a alors : 12 2
F
mA
→=
G
G
.
A
G
est appelé champ gravitationnel créé par la masse m1 au
point 2. On a alors : 1
12
2
Gm
A
u
r→
−
=
GG et la force vaut 12 2
F
mA
→=
G
G
. On retient pour l’instant que cela permet de
simplifier les expressions littérales en écrivant 2
mA
G
.
b) Interaction électromagnétique
C’est elle qui régit le plus grand nombre de phénomènes de la vie courante : il s’agit de l’interaction entre particules
chargées électriquement. Ainsi la force exercée par un ressort est de nature électromagnétique car elle trouve son
origine dans la déformation du métal qui a pour effet de rapprocher ou d’éloigner des atomes ; comme ces derniers
sont faits de particules chargées, nous sommes bien ramenés à une interaction électromagnétique qui est gérée par
les équations de Maxwell (voir cours de deuxième année).
Soit une particule de charge q placée dans un champ électrique E
G
et un champ magnétique B
G, la force qui s’exerce
est appelée force de Lorentz (voir chapitre particule dans un champ électrique et un champ magnétique) :
^
F
qE qv B=+
G
GG
G
Cette formule sera utilisée ultérieurement dans le cours.
On va se placer pour l’instant dans le cas particulier de deux charges q1 et q2 en
interaction. La force qui s’exerce entre ces deux charges est donnée par la loi de
Coulomb :
Loi de Coulomb : 12
12 12
2
0
4
qq
F
u
r
πε
→→
=
GG
0
ε
est la permittivité diélectrique du vide. Elle vaut : 09
1
36 10
επ
=×F.m-1 = 8,84×10-12 F.m-1
Cette force est valable en toute rigueur quand les particules sont fixes dans un référentiel. On peut montrer qu’elle
contenue à être valable si la vitesse des points matériels est très petite devant la vitesse de la lumière dans le vide
()
81
310 m.sc−
=× .
Cette force a la même forme que l’interaction gravitationnelle mais elle en diffère par deux aspects :
• L’interaction gravitationnelle est une force attractive alors que l’interaction coulombienne est attractive ou
répulsive selon le signe des charges : Deux charges électriques de même signe se repoussent alors que deux
charges électriques de signe opposé s’attirent.
• L’interaction de Coulomb est beaucoup plus forte pour les particules élémentaires : exemple rapport des
forces entre un proton et électron :
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%