texte de la PC - Ecole polytechnique

ECOLE POLYTECHNIQUE −Promotion X2015
Laurent Sanchez-Palencia ([email protected])
web: http://www.uquantmat.fr/teachX-PHY431.html
RELATIVITÉ ET PRINCIPES VARIATIONNELS (PHY431)
Petite Classe 3 (22 novembre 2016)
Multiplicateurs de Lagrange
De nombreux problèmes en mathématique, physique ou économie et dans bien d’autres disciplines
peuvent être formulés sous la forme de problèmes d’optimisation sous contraintes. La méthode des
multiplicateurs de Lagrange est une approche générale de résolution de tels problèmes. En dépit
de son apparente complexité, elle s’avère souvent remarquablement simple et puissante. L’objectif
de cette PC est d’introduire la méthode et d’illustrer sa mise en œuvre sur des exemples concrets.
1 Quelques exercices appéritifs
1. Déterminer le rayon et la hauteur de la boîte cylindrique droite à base circulaire qui
minimise la surface totale Spour un volume Vfixé.
2. Déterminer le plus court chemin entre deux points A et B d’un espace euclidien en utilisant
les coordonnées cartésiennes. On pourra écrire la longueur du trajet comme une intégrale
en temps de la vitesse et faire apparaître un lagrangien. On pourra par ailleurs se limiter
à un espace de dimension d= 2 (plan).
3. Même question pour des chemins contraints à se situer sur une sphère en dimension d= 3.
On utilisera d’abord des coordonnées cartésiennes, puis des coordonnées sphériques si le
temps le permet.
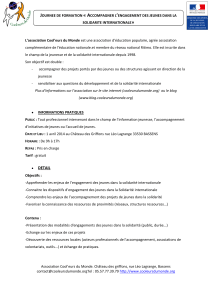
2 Le brachistochrone
L’objectif de ce problème est de déterminer la forme du support qui permet à un mobile de
descendre le plus rapidement possible d’un point à un autre. Plus précisément, on lâche un point
matériel classique de masse msans vitesse initiale d’un point O. Le point matériel se déplace
alors sous l’effet de la pesanteur, d’accélération g, et sans frottement sur un support donné par
la courbe y(x), inconnue à ce stade, dans le plan vertical. L’axe xest horizontal et l’axe yest
vertical et dirigé dans le sens de la gravité. La courbe y(x)joint les points Oet A,Aétant situé
plus bas et à droite de O(voir la Fig. 1).
1. Ecrire le temps Tmis par le point matériel pour aller de OàAsous la forme d’une intégrale
sur xentre 0et xA. On pourra remarquer que l’énergie du point matériel, E=mv2
2−mgy,
est nulle si l’on prend l’origine de l’énergie potentielle au point O. Ecrire de même sous la
forme d’une intégrale sur xla contrainte qui impose que la courbe y(x)passe par Oet A.
1

Figure 1 – Le problème du brachis-
tochrone. Un mobile de masse mse
déplace sous l’effet de la pesanteur
sur un support d’équation y(x). On
cherche la forme du support qui mi-
nimise le temps mis par le point ma-
tériel, initialement immobile, pour
aller du point Oau point A.
2. En déduire l’action Set le lagrangien Ldu problème. Ecrire l’équation d’Euler-Lagrange
et en déduire que la courbe brachistochrone est solution de l’équation différentielle
y(1 + y′2) = C, (1)
où Cest une constante que l’on ne cherchera pas à calculer tout de suite.
3. En introduisant la quantité θ(x)telle que y′(x)≡1
tan(θ/2) , montrer que la courbe brachis-
tochrone peut être écrite sous la forme paramétrée
x(θ) = x0+C
2(θ−sin θ)
y(θ) = C
2(1 −cos θ).
(2)
Reconnaître l’équation paramétrique de la cycloïde.
4. En se souvenant que le mobile est lâché du point Osans vitesse initiale, tracer la courbe
cycloïde entre θ= 0 et θ= 6π, voire plus.
5. Justifier que le point Aest nécessairement situé sur la première arche de cycloïde. On
pourra s’aider du tracé obtenu à la question précédente mais une explication argumentée
est bien sûr attendue.
6. On appelle θAla valeur du paramètre θau point A. Déterminer le rapport yA/xAen
fonction du paramètre θA. Quelle est la forme qualitative de la courbe brachistochrone
entre Oet Aselon que yA
xA<2
πou yA
xA>2
π? Commenter.
7. Montrer que la courbe obtenue est tautochrone, c’est-à-dire que le temps mis par le point
matériel, initialement sans vitesse, pour atteindre le point le plus bas de la courbe est
indépendant du point de départ. Dans l’intégrale donnant le temps de parcours, on pourra
poser τ≡1+cos θ
cos θ0−cos θoù θ0est le paramètre défini à la question 3 au point de départ.
3 La corde pesante (facultatif)
Déterminer la forme d’une corde pesante à l’équilibre, de longueur Lfixée et dont les extrémités
sont attachées aux points (−x0,0) et (+x0,0) sur l’axe horizontal. On rappelle que l’équilibre
est obtenu lorsque l’énergie potentielle (ici de gravité) est minimale.
2

Annexe : La méthode des multiplicateurs de Lagrange
On cherche les extrema d’une fonction
f|Σ: Σ →R
où Σest une sous-variété de RNdéfinie par les Pcontraintes
gp(~
R) = 0,∀~
R∈RN.
On suppose que la fonction f|Σpeut être prolongée sur RNen la fonction f. On suppose par
ailleurs que toutes les fonctions fet gpsont différentiables et que pour tout p∈[1..P ], on a
~
∇gp6= 0 en tout point ~
Rde la sous-variété Σ.
La méthode des multiplicateurs de Lagrange consiste à suivre la démarche suivante :
1. Pour toutes valeurs des λp, on introduit la fonction auxiliaire
Fλ1,...,λP(~
R)≡f(~
R)−
P
X
p=1
λpgp(~
R)
définie sur RN.
2. On cherche les extrema de Fλ1,...,λP(~
R). Ce sont les points ~
R=~
Rn(λ1, ..., λP)tels que
~
∇Fλ1,...,λP(~
R) = 0,
où nest un indice pour les solutions multiples éventuelles.
3. Parmi toutes ces solutions, on cherche celles qui satisfont aux contraintes, c’est à dire les
points ~
R=~
Rn(λ1, ..., λP)tels que
gp(~
R) = 0,pour p∈[1..P ].
Le plus souvent, ceci permet de déterminer les valeurs des multiplicateurs de Lagrange
λp(n)pour p∈[1..P ]et les extremas contraints recherchés ~
Rn.
3
1
/
3
100%