Changements de référentiels et forces d`inertie

Chapitre 6
Changements de r´ef´erentiels et forces
d’inertie
Nous avons d´ej`a vu et utilis´e les changements de r´ef´erentiel. Nous avons vu que c’´etait un moyen tr`es
utile pour ´etudier le mouvement quelconque d’un solide ind´eformable. Nous allons nous int´eresser ‘a un autre
probl`eme li´e au fait que nous vivons sur une plan`ete qui tourne sur elle-mˆeme : le r´ef´erentiel terrestre n’´etant
pas galil´een, comment y appliquer les lois de la physique sans avoir `a e↵ectuer un changement de r´ef´erentiel
vers un r´ef´erentiel galil´een `a chaque fois ?
Nous allons commencer par quelques rappels concernant les changements de r´ef´erentiels avant de r´epondre
`a la question.
6.1 Quelques rappels
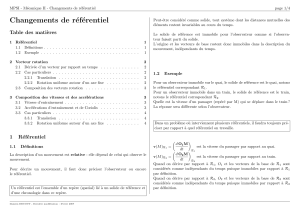
Il nous faut tout d’abord choisir, de fa¸con arbitraire, un r´ef´erentiel dit absolu, suppos´e immobile, et un
r´ef´erentiel dit relatif, suppos´e en mouvement par rapport au r´ef´erentiel absolu. Puis, pour ´eviter toute confusion,
nous mettrons un indice a`a tout ce qui est absolu et un indice r`a tout ce qui est relatif.
xa
ya
za
Oaxr
yr
zr
Or
M
x
Figure 6.1 – R´ef´erentiels relatif et absolu
Ainsi, dans un rep`ere relatif li´e au r´ef´erentiel relatif, le point M´etudi´e a pour coordonn´ees,
!
OrM=xr~uxr+yr~uyr+zr~uzr,(6.1)
et dans le rep`ere absolu, li´e au r´ef´erentiel absolu, le mˆeme point a pour coordonn´ees,
!
OaM=xa~uxa+ya~uya+za~uza.(6.2)
55

CHAPITRE 6. CHANGEMENTS DE R ´
EF ´
ERENTIELS ET FORCES D’INERTIE 56
Il est important de bien ´ecrire les vecteurs de base en faisant apparaˆıtre le r´ef´erentiel choisi pour ´eviter toute
ambiguit´e.
Ce qui va nous int´eresser par la suite, c’est de caract´eriser le mouvement absolu du point M`a partir de son
mouvement relatif. Pour cela, nous allons relier les vitesses par rapport `a chacun des r´ef´erentiels. Puis, nous
ferons de mˆeme pour les acc´el´erations.
6.2 Composition des vitesses
6.2.1 Vitesses relative et absolue
La vitesse relative est, par d´efinition, la vitesse du point Mpar rapport au r´ef´erentiel relatif,
~vr=dxr
dt ~uxr+dyr
dt ~uyr+dzr
dt ~uzr.(6.3)
La vitesse absolue, quant `a elle, est la vitesse par rapport au r´ef´erentiel absolu. Pour la relier `a la vitesse relative,
nous allons partir de !
OaMen faisant apparaˆıtre le mouvement relatif :
!
OaM=!
OaOr+!
OrM(6.4)
=!
OaOr+xr~uxr+yr~uyr+zr~uzr.(6.5)
La vitesse absolue est obtenue en d´erivant par rapport au temps. Les vecteurs de base du rep`ere relatif sont a
priori mobiles par rapport au r´ef´erentiel absolu et peuvent donc d´ependre du temps. On obtient donc
~va=d!
OaOr
dt +dxr
dt ~uxr+dyr
dt ~uyr+dzr
dt ~uzr+xr
d~uxr
dt +yr
d~uyr
dt +zr
d~uzr
dt .(6.6)
Dans l’´equation (6.6), on reconnait la vitesse relative donn´ee ´equation (6.3). Tout ce qui reste correspond
`a la vitesse absolue si la vitesse relative est nulle. C’est donc la vitesse absolue d’un point immobile dans le
r´ef´erentiel relatif. Cela correspond donc `a la vitesse du r´ef´erentiel relatif par rapport au r´ef´erentiel absolu, `a
l’endroit o`u est M. Cette vitesse est appel´ee vitesse d’entraˆınement et not´ee ~ve. D’o`u, finalement,
~va=~vr+~ve,(6.7)
avec
~ve=d!
OaOr
dt +xr
d~uxr
dt +yr
d~uyr
dt +zr
d~uzr
dt .(6.8)
La relation (6.7) est tr`es intuitive. La difficult´e va consister `a simplifier l’expression de ~vequi fait apparaˆıtre
des d´eriv´ees de vecteurs de base.
Si les r´ef´erentiels sont en translation l’un par rapport `a l’autre, les vecteurs de base d’un rep`ere li´e au
r´ef´erentiel relatif sont invariants dans le r´ef´erentiel absolu et leur d´eriv´ee est donc nulle. Mais ce n’est pas
toujours le cas. Si ces vecteurs de base tournent par rapport au r´ef´erentiel absolu, on peut les voir comme un
solide ind´eformable tournant avec une vitesse angulaire ~
⌦. Et donc
d~uxr
dt =~
⌦^~uxr.(6.9)
Il en est de mˆeme pour les deux autres vecteurs.
Ainsi, la vitesse d’entraˆınement peut s’´ecrire plus simplement,
~ve=d!
OaOr
dt +xr~
⌦^~uxr+yr~
⌦^~uyr+zr~
⌦^~uzr
=d!
OaOr
dt +~
⌦^(xr~uxr+yr~uyr+zr~uzr).(6.10)
Finalement,
~ve=d!
OaOr
dt +~
⌦^!
OrM. (6.11)

CHAPITRE 6. CHANGEMENTS DE R ´
EF ´
ERENTIELS ET FORCES D’INERTIE 57
Les mouvements du r´ef´erentiel relatif par rapport au r´ef´erentiel absolu peuvent ˆetre d´ecompos´es en une trans-
lation de l’origine du rep`ere relatif plus un mouvement de rotation de ses axes.
Cette expression, que l’on peut aussi ´ecrire
~ve=~va(Or)+~
⌦^!
OrM, (6.12)
est similaire `a celle de Varignon, ce qui n’est pas une surprise car le r´ef´erentiel relatif peut ˆetre vu comme un
solide ind´eformable de taille infinie. Elle a l’avantage d’ˆetre simple `a retenir et `a calculer.
Il apparaˆıt alors clairement que la vitesse d’entraˆınement d´epend de la position du point M.Onnepeut
plus parler de la vitesse du r´ef´erentiel relatif par rapport au r´ef´erentiel absolu, mais de la vitesse du r´ef´erentiel
relatif `a l’endroit o`u se trouve le point ´etudi´e.
6.2.2 Application : R´ef´erentiels en translation
On dit que deux r´ef´erentiels sont en translation l’un par rapport `a l’autre si les axes ne tournent pas. Ainsi,
un r´ef´erentiel li´e `a une nacelle de la grande roue repr´esent´ee figure 6.2 est en translation par rapport au sol.
Figure 6.2 – Exemple de mouvement de translation : chaque nacelle est en translation par rapport au sol.
(Dessin t´el´echarg´e sur Internet).
Si les vecteurs du rep`ere relatif sont simplement translat´es par rapport au r´ef´erentiel absolu, ils ne changent
ni d’orientation, ni de sens. Et donc leur d´eriv´ee par rapport au temps est nulle. L’expression de la vitesse
d’entraˆınement est alors tr`es simple,
~ve=d!
OaOr
dt .(6.13)
Elle ne d´epend pas du point M. Tous les points du r´ef´erentiel relatif se d´eplacent `a la mˆeme vitesse par rapport
au r´ef´erentiel absolu.
Exemple : Une voiture sous la pluie
Consid´erons une voiture qui roule `a une vitesse constante sur une route rectiligne et horizontale. Il pleut et
la pluie tombe verticalement par rapport `a la route. Comment tombe la pluie par rapport `a la voiture ? Nous

CHAPITRE 6. CHANGEMENTS DE R ´
EF ´
ERENTIELS ET FORCES D’INERTIE 58
vr-ve
vr
ve
va
Figure 6.3 – Exemple de la pluie tombant sur une voiture en mouvement
allons commencer par d´efinir arbitrairement les r´ef´erentiels d’´etude : supposons que le r´ef´erentiel relatif est li´e
`a la route et l’absolu, `a la voiture. La vitesse de la pluie par rapport au sol est donc la vitesse relative et c’est
la vitesse absolue que nous cherchons. La vitesse d’entraˆınement, qui va nous permettre de faire le lien, est
´egale `a l’oppos´e de la vitesse de la voiture. Ainsi, il apparait clairement sur le graphe de la figure 6.3 que le
pare-brise d’une voiture est plus expos´e `a la pluie que la lunette arri`ere quand la voiture avance. C’est conforme
`a l’observation.
6.2.3 Application : R´ef´erentiels en rotation simple
Nous allons supposer maintenant que les axes du r´ef´erentiel relatif tournent par rapport au r´ef´erentiel absolu.
Mais pour simplifier, nous consid´ererons que les origines des deux rep`eres restent toujours confondues. Cette
situation correspond, par exemple, au cas d’un man`ege. La vitesse d’entraˆınement peut s’´ecrire plus simplement,
~ve=~
⌦^!
OM. (6.14)
Elle d´epend clairement de la position du point M.
Exemple : Un man`ege
Consid´erons un man`ege tournant `a une vitesse angulaire ⌦constante. Le tenancier, mont´e sur la man`ege, se
d´eplace d’un enfant `a l’autre pour ramasser les tickets. On d´efinit cette fois-ci le r´ef´erentiel absolu li´e `a la Terre
et le r´ef´erentiel relatif li´e au man`ege.
La vitesse d’entraˆınement peut ˆetre calcul´ee en utilisant la formule pr´ec´edente et les coordonn´ees cylindriques,
~ve=⌦~uz^r~ur=r⌦~u✓.(6.15)
Elle d´epend de r, la distance `a l’axe du man`ege du tenancier. ~vecorrespond donc `a la vitesse de d´eplacement
du man`ege par rapport `a la Terre sous les pieds du tenancier. On d´efinit le point co¨ıncidant ou le point d’en-
traˆınement, not´e Ecomme un point fixe par rapport au r´ef´erentiel relatif et co¨ıncidant avec le point M´e t u d i ´e ,
c’est `a dire situ´e constamment sous les pieds du tenancier dans cet exemple. Eest red´efini `a chaque pas du
tenancier. ~veest la vitesse du point Epar rapport au r´ef´erentiel absolu.
La notion de point co¨ıncidant permet de trouver la vitesse d’entraˆınement sans calcul dans les cas simples
comme celui-ci.
6.3 Composition des acc´el´erations
Nous allons maintenant faire de mˆeme pour les acc´el´erations.

CHAPITRE 6. CHANGEMENTS DE R ´
EF ´
ERENTIELS ET FORCES D’INERTIE 59
6.3.1 Acc´el´erations relative et absolue
L’acc´el´eration relative est, par d´efinition, l’acc´el´eration du point Mpar rapport au r´ef´erentiel relatif et peut
ˆetre calcul´ee en d´erivant la vitesse relative :
~ar=d2xr
dt2~uxr+d2yr
dt2~uyr+d2zr
dt2~uzr.(6.16)
L’acc´el´eration absolue est, quant `a elle, l’acc´el´eration par rapport au r´ef´erentiel absolu et est obtenue en d´erivant
la vitesse absolue. Pour pouvoir la relier `a l’acc´el´eration relative, nous allons commencer par exprimer la vitesse
absolue en faisant apparaˆıtre toutes les coordonn´ees,
~va=d!
OaOr
dt +dxr
dt ~uxr+dyr
dt ~uyr+dzr
dt ~uzr+~
⌦^(xr~uxr+yr~uyr+zr~uzr).(6.17)
Il n’y a plus qu’`a d´eriver chacun des termes. . . C’est tr`es long mais pas compliqu´e,
~aa=d2!
OaOr
dt2+d2xr
dt2~uxr+d2yr
dt2~uyr+d2zr
dt2~uzr+dxr
dt
d~uxr
dt +dyr
dt
d~uyr
dt +dzr
dt
d~uzr
dt
+d~
⌦
dt ^(xr~uxr+yr~uyr+zr~uzr)+~
⌦^(dxr
dt ~uxr+dyr
dt ~uyr+dzr
dt ~uzr)
+~
⌦^(xr
d~uxr
dt +yr
d~uyr
dt +zr
d~uzr
dt ).(6.18)
Dans l’´equation pr´ec´edente, on reconnait !
OrM,~vret ~ar. En ´ecrivant les d´eriv´ees des vecteurs unitaires `a l’aide
du vecteur ~
⌦, comme pr´ec´edemment, on obtient,
~aa=d2!
OaOr
dt2+~ar+~
⌦^~vr
+d~
⌦
dt ^!
OrM+~
⌦^~vr
+~
⌦^(~
⌦^!
OrM),(6.19)
ou, en regroupant les termes identiques,
~aa=d2!
OaOr
dt2+~ar+2
~
⌦^~vr+d~
⌦
dt ^!
OrM+~
⌦^(~
⌦^!
OrM).(6.20)
Ouf ! Ne reste plus qu’`a interpr´eter chacun de ces termes.
6.3.2 Acc´el´eration d’entraˆınement
Si le point Mest immobile dans le r´ef´erentiel relatif, son acc´el´eration absolue correspondra alors `a l’acc´el´eration
du r´ef´erentiel relatif par rapport au r´ef´erentiel absolu en ce point particulier. On l’appelle alors acc´el´eration d’en-
traˆınement. En annulant ~vret ~ardans l’´equation (6.20), on obtient,
~ae=d2!
OaOr
dt2+d~
⌦
dt ^!
OrM+~
⌦^(~
⌦^!
OrM).(6.21)
Ce r´esultat ´etant difficile `a obtenir, il doit ˆetre connu de l’´etudiant.
Remarques :
— Dans l’expression de l’acc´el´eration d’entraˆınement, les parenth`eses sont indispensables pour le double
produit vectoriel, car le r´esultat d´epend de l’ordre dans lequel on fait le calcul. En e↵et, ~
⌦^~
⌦=~
0!
—On peut v´erifier que ~ae6=d~ve
dt . Il faut donc apprendre la formule et ´eviter de calculer ~ae`a partir de ~ve.
C’est une faute classique.
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%