Chapitre III : Description du fluide en mouvement

Spéciale PSI - Cours "Mécanique des uides" 1
Cinématique des uides
Chapitre III : Description du uide en mouvement
Contents
1Lemodèleduuide continu 2
2Champ des vitesses dans un uide 2
2.1 Description de Lagrange ................................................ 2
2.2 Description d’Euler ................................................... 3
2.3 Compatibilité de deux descriptions .......................................... 3
2.4 Représentation et visualisation des écoulements ................................... 3
2.4.1 Approche lagrangienne : trajectoire ..................................... 3
2.4.2 Approche eulérienne : lignes de courants ................................... 3
2.4.3 Approche expérimentale : ligne d’émission .................................. 4
2.4.4 Visualisation des écoulements ......................................... 4
2.5 Cas particulier des écoulements stationnaires .................................... 4
2.6 Exemple : mouvement d’un cylindre dans un 'uide initialement au repos .................... 4
2.6.1 Position du problème .............................................. 4
2.6.2 Etude dans le référentiel Rlié au cylindre ................................. 4
2.6.3 Etude dans le référentiel Rlié au 'uide ................................... 6
3Dérivée particulaire d’un champ 7
3.1 Dé+nition ........................................................ 7
3.2 Expression en description eulérienne ......................................... 8
3.3 Application à l’accélération .............................................. 8
4Densités de courant et débits 9
4.1 Débit volumique .................................................... 9
4.2 Débit massique ..................................................... 9
4.3 Sources et puits ..................................................... 10
4.4 Surface de contrôle et surface particulaire ...................................... 10
4.4.1 Bilan sur un système ouvert .......................................... 10
4.4.2 Bilan sur un système fermé .......................................... 10
5Equation de conservation de la masse 10
5.1 Bilan de masse sur un volume de contrôle - équation de continuité - approche eulérienne ............ 10
5.2 Bilan de masse sur un volume particulaire - équation de continuité - approche lagrangienne .......... 11
5.2.1 Dérivée particulaire d’une grandeur G(t)=Vg(r, t)dextensive (HP) ............... 11
5.2.2 Bilan de masse en description lagrangienne ................................. 12
6Ecoulements particuliers 12
6.1 Evolution d’un volume élémentaire de 'uide ..................................... 12
6.2 Rappels sur l’interprétation physique des opérateurs ................................ 13
6.3 Cas du régime stationnaire .............................................. 14
6.4 Cas d’un 'uide incompressible ............................................. 14
6.5 Cas d’un écoulement incompressible ......................................... 15
6.6 Ecoulements tourbillonnaires ou non tourbillonnaires ................................ 15
6.6.1 Dé+nitions ................................................... 15
6.6.2 Potentiel des vitesses .............................................. 15
6.6.3 Exemple de la tornade ............................................. 15
7Analogies avec l’électromagnétisme 18

2Mécanique des uides. Chapitre III : Description du uide en mouvement
Cinématique des uides
Chapitre III : Description du 'uide en mouvement
Objectifs :
•Description lagrangienne et eulérienne du uide; dérivée particulaire.
•Introduction des densités de courant, débits; équation de conservation de la masse.
1Le modèle du uide continu
Rappel :
•Un 'uide est un milieu matériel continu,déformable,quipeuts’écouler.
•Modèle du 'uide continu :
—on n’étudie pas individuellement chaque particule.
—Les grandeurs physiques dé+nies dans le 'uide sont des moyennes sur des éléments de volume dmésoscopiques
(typiquement 1µm), c’est à dire à la fois petit devant les dimensions macroscopiques et su=samment grand devant
les dimensions microscopiques pour contenir un grand nombre de molécules de 'uide.
2Champ des vitesses dans un uide
2.1 Description de Lagrange
Pour décrire le 'uide, on le découpe en éléments de volume mésoscopiques, physiquement fermés,
appelés particules 'uides. On suit l’évolution au cours du temps d’une de ces particules uides :Mi.
La description lagrangienne consiste donc à dé+nir les grandeurs physiques en des points attachés à la matière : c’est la
description utilisée en mécanique du point.
Cette description est bien adaptée pour l’écriture des dé+nitions et théorèmes de la mécanique.
Soit Miune particule 'uide et vison vecteur vitesse (viest dé+ni, comme toutes les grandeurs physiques dans le 'uide, en
valeur moyenne sur l’élément de volume. Il se confond en fait avec la vitesse de son centre d’inertie). Soit
OMile vecteur
position de la particule 'uide. On a alors :
vi=d
OMi
dt =dx
i
dt
i+dy
i
dt
j+dz
i
dt
k=vi(t)
Cette vitesse ne dépend explicitement que du temps (les coordonnées d’espace sont des fonctions du temps). Plus précisé-
ment vi(t)dépend de tet de la position à l’origine des temps de la particule 'uide: vi(t)=
V(ro,t).

Mécanique des uides. Chapitre III : Description du uide en mouvement 3
2.2 Description d’Euler
Pour décrire le 'uide, on le découpe en éléments de volume mésoscopiques 'xes dans le référentiel d’étude
donc physiquement ouverts si le 'uide bouge.
La description eulérienne consiste donc à dé+nir les grandeurs physiques en des points 'xes du référentiel. La description
eulérienne est bien adaptée pour e?ectuer des analogies avec l’électromagnétisme (établissement d’équations locales).
Dans cette description la vitesse en un point Mdu 'uide est une fonction de deux variables indépendantes Met t:
v=v(r, t)
2.3 Compatibilité de deux descriptions
•En description lagrangienne, le vecteur vitesse vd’un point Mdu 'uide est le vecteur de la particule 'uide qui l’entoure.
•En description eulérienne, le vecteur vitesse vd’un point Mdu 'uide à un instant test le vecteur vitesse de la particule
'uide qui se trouve en Màcetinstantt.
A chaque instant, les lignes de champ des vitesses dans les deux descriptions coïncident. Une même vitesse peut être
analysée de deux façons di?érentes.
2.4 Représentation et visualisation des écoulements
2.4.1 Approche lagrangienne : trajectoire
Dans la description lagrangienne, on suit l’évolution d’une particule de 'uide.
La trajectoire d’une particule 'uide est dé+nie comme le chemin suivi par cette particule au cours du temps, c’est-à-dire
l’ensemble des positions successives de cette particule au cours de son mouvement. On peut les visualiser expérimentalement
en photographiant en pose prolongée le déplacement d’un traceur émis pendant un temps très court en un point du 'uide
(colorant, particules di?usant la lumière, bulles d’hydrogène, ... ). On les obtient mathématiquement par intégration
temporelle du champ de vitesse lagrangien
V(ro,t)
r(t)=ro+t
to
V(ro,t
)dttrajectoire d’une particule uide
2.4.2 Approche eulérienne : lignes de courants
Les lignes de courants sont les lignes du champ de vecteurs v; elles sont dé+nies comme étant les tangentes en chaque point
au vecteur vitesse v(x,y,z,t
o)à un instant donné to.Untube de courant est l’ensemble des lignes de courants s’appuyant
sur un contour fermé. On peut visualiser expérimentalement les lignes de courants en faisant une photo en légère pose d’un
ensemble de particules: la direction des segments obtenus donne celle du vecteur vitesse ; leur longueur est proportionnelle
au module de la vitesse.
Mathématiquement, ces lignes sont dé+nies par l’ensemble des points M(x,y,z)tels qu’un déplacement élémentaire d
M(dx, dy, dz)
le long de la ligne soit colinéaire au vecteur vitesse v; ceci peut s’exprimer par :
d
Mv=
0soit dx
vx
=dy
vy
=dz
vz
lelongd’unelignedecourants
On obtient l’équation des lignes de courants par intégration de ces deux équations di?érentielles.

4Mécanique des uides. Chapitre III : Description du uide en mouvement
2.4.3 Approche expérimentale : ligne d’émission
Une ligne d’émission représente l’ensemble des positions successives des particules 'uides ayant coïncidé à un instant antérieur
avec un point Mo(xo,y
o,z
o). Elles sont obtenues expérimentalement par émission continue d’un traceur (colorant par exemple)
au point Mo, et photographie instantanée de l’ensemble des positions du traceur.
2.4.4 Visualisation des écoulements
Voir en annexe les techniques utilisées pour visualiser les écoulements.
2.5 Cas particulier des écoulements stationnaires
Un écoulement stationnaire est tel que tous les champs dé+nis dans le 'uide sont indépendants du temps,
et en particulier le champ des vitesses.
Dans une telle situation le champ des vitesses eulérien ne dépend pas explicitement du temps : v(r, t)=v(r)
Dans ce cas, les lignes de courants, les trajectoires et les lignes d’émission coïncident.
En e?et, les di?érentes particules « marquées» émises d’un même point au cours du temps ont les mêmes trajectoires :
celles-ci représentent donc en même temps les lignes d’émission.
Par ailleurs, le vecteur vitesse local (indépendant du temps) est tangent en chaque point aux trajectoires qui représentent
donc également les lignes de courants.
Au contraire, dans le cas d’un écoulement non stationnaire (par exemple dans le cas d’un obstacle qui se déplace dans un
récipient où le 'uide est au repos loin de l’obstacle), ces di?érentes lignes sont en général distinctes, et la correspondance
entre elles est di=cile à étudier. On s’intéresse alors en général aux lignes de courants à l’intérieur du 'uide.
Remarque :
Selon le référentiel dans lequel on se place l’écoulement peut être statonnaire ou non stationnaire : cas du cylindre
en translation avec une vitesse
Voconstante dans le 'uide initialement au repos :
•dans le référentiel lié au cylindre, le champ de vitesse ne dépend pas explicitement du temps : les lignes de
courants sont confondues avec les trajectoires;
•dans le référentiel lié au 'uide initialement au repos, le champ de vitesse dépend explicitement du temps : les
lignes de courants ne sont plus confondues avec les trajectoires.
2.6 Exemple : mouvement d’un cylindre dans un uide initialement au repos
2.6.1 Position du problème
Un cylindre de rayon ase déplace à la vitesse
V0constante, perpendiculaire à ses génératrices, dans un 'uide initialement au
repos.
Soit Rle référentiel lié au 'uide initialement au repos, repéré par le système d’axe orthonormé, +xe R(O;ex,ey,ez)avec
V0=V0ex(V0>0) et (Oz)parallèle aux génératrices du cylindre.
Soit Rle référentiel lié au cylindre, repéré par le système de coordonnées polaires R(O;er,e,ez)ayant pour origine l’axe
du cylindre passant par le point O.At=0, on supposera que Oet Osont confondus.
On admet que le champ des vitesses dans le référentiel Rest donné par :
v(r, ,t)=
V0(1 a2/r2)coser
V0(1 + a2/r2)sine
2.6.2 Etude dans le référentiel Rlié au cylindre
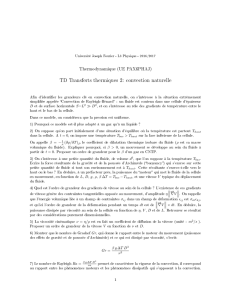
2.6.2.1 Lignes de courants dans le référentiel Rlié au cylindre
Les lignes de courants à un instant t=t0sont les lignes de champ de v(r, ,t
0). Leur équation di?érentielle est :
dr
vr(r, ,t
0)=rd
v(r, ,t
0)
dr
V0(1 a2/r2)cos=rd
V0(1 + a2/r2)sin
(1 + a2/r2)
ra2/r dr =cos
sin d
ra2/r =A/ sin
L’allure des lignes de courants peut être obtenue par voie informatique :

Mécanique des uides. Chapitre III : Description du uide en mouvement 5
>wi t h(pl ot s ):
>s : =s eq(i mpl i ci t pl ot ((r-1/r )*s i n(t het a)=i /10, r =1. . 5, t het a=0. . 2*Pi , coor ds =pol ar ,
numpoi nt s=1000, col or =COLOR(HUE, (i +20)/40)), i =-20. . 20):
>cyl i ndre: =pl ot ([1, t het a, t het a=0. . 2*Pi ], coor ds =pol ar, scal i ng=CONSTRAI NED,
col or=bl ack, t hi ckness =3):
>di spl ay(s, cyl i ndre);
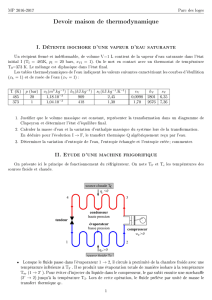
2.6.2.2 Trajectoire dans le référentiel Rlié au cylindre
Dans le référentiel Rlié au cylindre la vitesse d’une particule 'uide est
v(r, ,t)=
V0(1 a2/r2)coser
V0(1 + a2/r2)sine=
V0
a2
r2sin2cos2+V0ex
2V0
a2
r2sin cos ey
sin =y/r et cos =x/r avec r2=x2+y2v(x,y
,t)=
V0a2
x2+y2y2x2
x2+y2+V0ex
2V0a2
x2+y2 xy
x2+y2ey
Pour obtenir le système d’équations di?érentielles donnant la trajectoire il su=t d’écrire :
v(x,y
,t)=dx
dt ex+dy
dt ey
dx
dt =V0a2
x2+y2y2x2
x2+y2+V0
dy
dt =2V0a2
x2+y2 xy
x2+y2
Une résolution numérique donne les tracés ci-dessous :
>wi t h(DEt ool s ):
>eq1: =di f f (x(t ), t )=1+(y(t )^2-x(t )^2)/(x(t )^2+y(t )^2)^2;
>eq2: =di f f (y(t ), t )=-2*(y(t )*x(t ))/(x(t )^2+y(t )^2)^2;
>ci : =s eq(s eq([x(0)=j , y(0)=i /2+0. 1], i =0. . 10), j =-5. . -1):
>g: =DEpl ot ([eq1, eq2], [x(t ), y(t )], t =0. . 5, [ci ], s t eps i ze=. 1, l i necol or=t ,
met hod=rkf 45, vi ew=[-6. . 2, -1. . 6], arr ows=NONE):
>cyl i ndre: =pl ot ([1, t het a, t het a=0. . 2*Pi ], coords =pol ar, scal i ng=CONSTRAI NED, col or=bl ack, t hi cknes s =3):
>pl ot s[di s pl ay](g, cyl i ndr e);
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%