PROGRAMME DE COLLE S28 APPLICATIONS - MPSI Saint

MPSI du lyc´ee Rabelais http://mpsi.saintbrieuc.free.fr semaine du 3+1er septembre 2011
PROGRAMME DE COLLE S28
NB : seules les d´emonstrations des th´eor`emes, propositions ´etoil´ees ne sont pas exig´ees.
APPLICATIONS LIN´
EAIRES
Applications lin´eaires
D´efinition : Soient Eet Fdeux espaces vectoriels sur le mˆeme corps Ket f:E→Fune application. On dit que f
est lin´eaire de Edans Florsque
∀(~x, ~y)∈E2,∀(λ, µ)∈K2, f(λ·~x +µ·~y) = λ·f(~x) + µ·f(~y)
Notation : On note L(E, F )l’ensemble des applications lin´eaires de Edans F,L(E)l’ensemble des endomorphismes
de E,GL(E)l’ensemble des automorphismes de E.
Proposition.— L(E, F ),+,·est un K-ev.
Proposition.— Soit f∈ L(E, F ) et g∈ L(F, G). Alors g◦f:E→Gest une application lin´eaire de Edans G.
Endomorphismes
Proposition.— L(E),+,◦est un anneau.
D´efinition : Polynˆome d’endomorphisme —. Soient P∈K[X],P=apXp+ap−1Xp−1+···+a1X+a0et f∈ L(E).
On d´efinit P(f)∈ L(E)par
P(f) = apfp+ap−1fp−1+···+a1f+a0idE
Th´eor`eme*.— Formule du binˆome et identit´e g´eom´etrique —. Soient f, g deux endomorphismes de Etels que
f◦g=g◦f. Alors pour tout entier n∈N
(f+g)n=
n
X
k=0 n
kfk◦gn−kfn+1 −gn+1 = (f−g)◦
n
X
k=0
fk◦gn−k
Isomorphismes
D´efinition : Soient Eet Fdeux K-ev. On appelle isomorphisme de Esur Ftoute application lin´eaire et bijective
fde Esur F.
Proposition.— Isomorphisme r´eciproque
Soit f∈ L(E, F ) un isomorphisme de Esur F. Alors f−1est un isomorphisme de Fsur E, appel´e isomorphisme
r´eciproque de f.
Noyau et image d’une application lin´eaire
D´efinition : Soit f:E→Fune application lin´eaire.
l’image de fest l’image directe de Epar f. On note Im f={f(~x) ; ~x ∈E}={~y ∈F| ∃~x ∈E;f(~x) = ~y}
le noyau de fest l’ensemble des ant´ec´edents de ~
0Fpar f. On note Ker f={~x ∈E|f(~x) = ~
0F}.
Proposition.— Soit f∈ L(E, F ), alors
Im fest un sous-espace vectoriel de F.
Ker fest un sous-espace vectoriel de E.
Th´eor`eme.— caract´erisation des applications lin´eaires injectives/surjectives
Soient E, F des K-e.v et f∈ L(E, F ) une application lin´eaire de Evers F, alors
•fest surjective si et seulement si Im f=F
•fest injective si et seulement si Ker f={~
0E}
1

Image d’une base par une application lin´eaire
Proposition.— Soit B= (~e1,...,~en) une base d’un K-ev Eet f∈ L(E, F ). Alors
Im f=Vect f(~e1),...,f(~en)
Proposition.— Soit B= (~e1,...,~en) une base d’un K-ev Eet F= ( ~
f1,..., ~
fn) une famille de nvecteurs de F.
Il existe une application lin´eaire f:E→F, unique telle que ∀i∈[[1, n]], f(~ei) = ~
fi
Th´eor`eme.— Caract´erisation des isomorphismes par les bases —. Soit f∈ L(E, F ), (~e1,...,~en) une base de E.
•fest injective si et seulement si f(~e1),...,f(~en)est libre dans F
•fest surjective si et seulement si f(~e1),...,f(~en)est g´en´eratrice de F
•fest un isomorphisme si et seulement si f(~e1),...,f(~en)est une base de F
Exemples d’applications lin´eaires
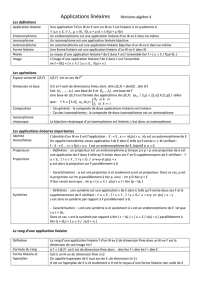
D´efinition : application lin´eaire acanoniquement associ´ee `a une matrice
Soit A∈ Mn,p(K)une matrice `a coefficients dans K. On d´efinit
l’application lin´eaire acanoniquement associ´ee `a Apar :
∀(x1,...,xp)∈Kp, a(x1, . . . , xp) = (y1,...,yn),
o`u les coefficients y1,...,ynde l’image sont obtenus grˆace `a la relation
matricielle ci-contre.
a1,1··· a1,p
.
.
..
.
.
an,1··· an,p
×
x1
.
.
.
xp
=
y1
.
.
.
yn
D´efinition : Projections, sym´etries, affinit´es
Soit E1et E2deux sev suppl´ementaires d’un K-ev E, de sorte que tout vecteur ~x de Es’´ecrit de mani`ere unique :
~x =~x1+~x2,o`u (~x1, ~x2)∈E1×E2.
La projection de Esur E1parall`element `a E2, est l’application not´ee pE1,E2:E→Ed´efinie par :
∀~x =~x1+~x2∈E;pE1,E2(~x) = ~x1
La sym´etrie par rapport `a E1parall`element `a E2, est l’application not´ee sE1,E2:E→Ed´efinie par :
∀~x =~x1+~x2∈E;sE1,E2(~x) = ~x1−~x2
L’affinit´e vectorielle de base E1de direction E2et de rapport α, l’application f:E→Ed´efinie par :
∀~x =~x1+~x2∈E;f(~x) = ~x1+α·~x2
Proposition.— La projection pE1,E2et la sym´etrie sE1,E2sont des endomorphismes de Equi v´erifient :
•Im pE1,E2=E1
•Ker pE1,E2=E2
•pE1,E2◦pE1,E2=pE1,E2
•sE1,E2◦sE1,E2=IdE
•sE1,E2est un automorphisme de Eet s−1
E1,E2=sE1,E2.
•sE1,E2= 2pE1,E2−IdE
Th´eor`eme.— Soit p∈ L(E) un projecteur, i.e. une application lin´eaire v´erifiant p◦p=p. Alors
Ker pet Im psont suppl´ementaires, i.e. E=Ker p⊕Im p
pest la projection de Esur Im pparall´element `a Ker p.
Th´eor`eme.— Soit s∈ L(E) une involution, i.e. un endomorphisme de Ev´erifiant s◦s=idE. Alors
Ker (s−IdE) et Ker (s+IdE) sont suppl´ementaires, i.e. E=Ker (s−IdE)⊕Ker (s+IdE)
sest la sym´etrie par rapport `a Ker (s−IdE) parall`element `a Ker (s+IdE).
Savoir-Faire : montrer qu’un endomorphisme est un projecteur ou un automorphisme involutif et trouver ses ´el´ements
caract´eristiques.
2
1
/
2
100%