Systèmes linéaires invariants

S. Tisserant – ESIL – Traitement du signal – 2008-2009 4 -1
Systèmes linéaires invariants
A. Définition
A.1. Notion de système
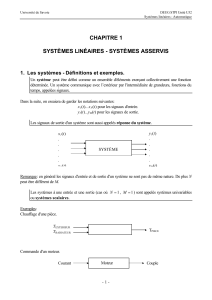
On essaye souvent de modéliser un système physique en interaction avec l’extérieur ou
d’autres systèmes en distinguant des entrées, un état et des sorties (figure 4-1).
m sortiesn entrées Système
Fig. 4-1 : Modélisation d’un système physique
A un instant donné, l’état du système peut dépendre de son histoire antérieure et des actions
instantanées qu’il subit. Les entrées représentent ces actions extérieures. Une sortie peut
représenter une action sur un autre système qui lui serait connecté. Ce peut également être une
grandeur interne caractéristique de l’état du système (une observable qu’un expérimentateur
pourrait mesurer par exemple). De manière générale, à tout instant une sortie dépend de l’état
du système et de l’état de chacune des entrées. Cette modélisation suppose que entrées et
sorties fonctionnement comme des canaux unidirectionnels (parfois matérialisés par des
flèches sur les schémas). C’est-à-dire, par exemple, que la manière dont est exploitée une
sortie n’a pas d’influence sur le comportement du système étudié. Il faut d’autre part que le
fonctionnement de ce système n’interfère pas avec le signal d’entrée. Par exemple la grandeur
physique en entrée peut être l’intensité d’un courant si celui-ci est fourni par une source idéale
de courant. Mais si ce courant est débité par une source de tension il peut dépendre de la
résistance d’entrée du système (sauf si celle-ci est infinie). Il sera alors impossible de choisir
l’intensité comme grandeur d’entrée.
A.2. Système scalaire
Nous nous limitons aux systèmes dits scalaires, c’est-à-dire comportant une entrée et une
sortie, notées respectivement e(t) et s(t) sur la figure 4-2. Ces quantités e(t) et s(t) représentent
des signaux et le système effectue un traitement. Le signal de sortie s(t) est souvent appelé
réponse du système à l’excitation e(t). La transformation réalisée par ce système peut être
modélisée par un opérateur F :
[
]
)t(eF)t(s
=

S. Tisserant – ESIL – Traitement du signal – 2008-2009 4 -2
Système
e(t) s(t)
Fig. 4-2 : Système scalaire
B. Propriétés des systèmes
Dans ce paragraphe nous passons en revue quelques propriétés qui peuvent caractériser
certains systèmes.
B.1. Linéarité
Un système, caractérisé par la transformation F, est linéaire si et seulement si :
[
]
[
]
[
]
)t(eF)t(eF)t(e)t(eF),(et)e,e(
2
2
1
1
2
2
1
1
2
1
2
1
λ+λ=λ+λλλ∀∀
B.2. Invariance temporelle
Un système, caractérisé par la transformation F, est invariant, ou stationnaire, si et seulement
si une translation temporelle sur l’entrée entraîne la même translation sur la sortie :
[
]
)t(eF)t(sete τ−=τ−τ∀∀
B.3. Causalité
En physique un effet ne peut précéder sa cause. Un système est dit causal s’il respecte cette
propriété. C’est-à-dire que si le signal d’entrée e(t) est nul pour t < t
0
, il en est de même pour
le signal de sortie s(t) :
00
tt0)t(stt0)t(e ≤∀=⇒≤∀=
B.4. Stabilité
Un système est stable si à tout signal d’entrée e(t) borné correspond une réponse s(t) bornée.
Un signal f(t) est borné si ∃ A ≥ 0 tel que ∀ t |f(t)| ≤ A.
C. Système linéaire invariant et réponse impulsionnelle
C.1. Définition
La réponse impulsionnelle, ou percussionnelle, h(t) d’un système, caractérisé par la
transformation F, correspond à la réponse de ce système lorsqu’il est soumis en entrée à une
impulsion de Dirac :

S. Tisserant – ESIL – Traitement du signal – 2008-2009 4 -3
h(t) = F[δ(t)]
C.2. Réponse du système linéaire
Considérons un système linéaire invariant (souvent nommé SLIT : Système Linéaire Invariant
en Temps). Soit e(t) un signal d’entrée quelconque. D’après la définition de la distribution de
Dirac nous pouvons écrire :
∫
∞
+
∞−
−δ= du)ut()u(e)t(e
Comme la transformation du filtre est linéaire nous pouvons écrire :
∫
∞
+
∞−
−δ== du)]ut([F)u(e)]t(e[F)t(s
Si le filtre est invariant nous avons :
)ut(h)]ut([F
−
=
−
δ
Ce qui nous donne :
∫
∞
+
∞−
−== du)ut(h)u(e)]t(e[F)t(s
L’intégrale obtenue correspond au produit de convolution e(t)∗h(t).
La réponse d’un système linéaire invariant à un signal quelconque e(t) en entrée est égale au
produit de convolution de ce signal avec la réponse impulsionnelle h(t) de ce système :
∫∫
∞
+
∞−
∞
+
∞−
−=−== du)u(h)ut(edu)ut(h)u(e)t(e*)t(h)t(s
C.3. Causalité
Pour un système linéaire invariant causal nous avons h(t) = 0 pour t < 0, car δ(t) = 0 pour
t < 0. La réciproque est vraie. En effet pour un système causal la réponse s(t) ne doit pas
dépendre de l’excitation au-delà de t. Reprenons l’expression du produit de convolution :
∫
∞
+
∞−
−= du)ut(h)u(e)t(s
Pour que cette condition soit respectée, quelque soit le signal en entrée, il est nécessaire et
suffisant d’avoir h(t-u) = 0 pour u > t, soit encore h(t) = 0 pour t < 0. Nous avons alors :

S. Tisserant – ESIL – Traitement du signal – 2008-2009 4 -4
∫∫
∞
+
∞−
−=−=
0
t
du)u(h)ut(edu)ut(h)u(e)t(s
C.4. Stabilité
Cherchons quelle condition doit vérifier la réponse impulsionnelle d’un système linéaire
invariant pour que celui-ci soit stable. Considérons une excitation bornée :
A)t(etquetel0A ≤∀≥∃
La sortie doit également être bornée :
B)t(stquetel0B ≤∀≥∃
Nous savons que :
∫∫
∞+
∞−
∞+
∞−
−≤−= du)u(h)ut(edu)u(h)ut(e)t(s
Donc si le signal d’entrée est borné :
∫∫
∞
+
∞−
∞
+
∞−
≤−≤ du)u(hAdu)u(h)ut(e)t(s
Un système linéaire invariant est donc stable si sa réponse impulsionnelle est intégrable en
valeur absolue :
Cdt)t(hquetel0C =≥∃
∫
∞
+
∞−
C.5. Réponse indicielle
La réponse indicielle g(t) d’un système est définie comme le signal obtenu en sortie de ce
système lorsqu’un échelon unité u(t) est appliqué en entrée. Si nous notons F la
transformation qui caractérise l’action du système, nous avons pour la réponse indicielle :
g(t) = F[u(t)]
Nous pouvons également relier la réponse indicielle à la réponse impulsionnelle :
∫∫ ∞−
∞
+
∞−
=−==
t
dv)v(hdv)v(h)vt(u)t(u*)t(h)t(g
La réponse indicielle correspond à l’intégrale de la réponse impulsionnelle.

S. Tisserant – ESIL – Traitement du signal – 2008-2009 4 -5
D. Equation différentielle et système linéaire invariant
Il existe de très nombreux systèmes physiques pour lesquels entrée et sortie sont reliées par
une équation différentielle linéaire à coefficients constants du genre :
∑∑
==
+=+
m
1k k
k
k0
n
1k k
k
k0
dt
)t(ed
b)t(eb
dt
)t(sd
a)t(sa
Montrons qu’un tel système est linéaire et invariant.
Il est très facile de vérifier la linéarité, qui est une conséquence immédiate de la linéarité de
l’équation différentielle. Vérifions l’invariance temporelle. Soit e(t) un signal quelconque et
s(t) la réponse correspondante. Vérifions que quelque soit τ, e(t - τ) et s(t - τ) sont reliés par la
même équation différentielle. Nous savons que :
∑∑
==
+=+
m
1k k
k
k0
n
1k k
k
k0
du
)u(ed
b)u(eb
du
)u(sd
a)u(sa
Nous pouvons choisir u = t - τ. Pour toute fonction nous avons :
du
)u(fd
dt
ud
du
)u(fd
dt
)u(fd ==
Ce qui, par itération, se vérifie pour toute dérivée d’ordre supérieur. Nous pouvons donc
écrire l’équation différentielle vérifiée par e(u) et s(u) sous la forme :
∑∑
==
+=+
m
1k k
k
k0
n
1k k
k
k0
dt
)u(ed
b)u(eb
dt
)u(sd
a)u(sa
C’est-à-dire :
∑∑
==
τ−
+τ−=
τ−
+τ−
m
1k k
k
k0
n
1k k
k
k0
dt
)t(ed
b)t(eb
dt
)t(sd
a)t(sa
Le signal retardé en sortie s(t - τ) est donc la réponse du système au signal retardé en entrée
e(t - τ).
Nous venons de vérifier que tout système gouverné par une équation différentielle linéaire à
coefficients constants est un système linéaire invariant. La réciproque n’est pas vraie.
L’opérateur retard T
a
en fournit le contre-exemple :
)at(e)]t(e[T)t(s
a
−==
Il est facile de vérifier qu’il s’agit d’un opérateur linéaire et invariant. Par contre, entrée et
sortie d’un tel système ne sont pas reliées par une équation différentielle.
 6
6
1
/
6
100%