Nanogénérateurs de courant alternatif

RECHERCHE
© Editions T.I.
8 - 2008
RE 118 - 1
Nanogénérateurs de courant
alternatif
par
Pascal VINCENT
et
Anthony AYARI
Les recherches en nanotechnologie ont été largement focalisées, au départ,
sur la réalisation de composants dont les performances pourraient pallier
la fin possible des technologies silicium. La manière d’alimenter ces
composants, quant à elle, s’est limitée à une approche macroscopique.
L’émergence de stratégies originales à l’échelle nanométrique pour la
génération de signaux, notamment alternatifs, est pourtant aussi vitale que
prometteuse dans un contexte de maîtrise des énergies.
1. Contexte
L’accroissement constant de la densité de transis-
tors dans les microprocesseurs les rend de plus en
plus gourmands en énergie. Cette forte
consommation induit des phénomènes de dis-
sipation et donc d’échauffement pouvant entraîner
la destruction des composants. Pour éviter de tels
regrettables incidents, d’importantes mesures
d’évacuation de la chaleur sont nécessaires. Mais le
problème reste que, à terme, la production même
d’énergie pour faire fonctionner des nanocompo-
sants risque d’être rédhibitoire. Ainsi, il a été
proposé de générer de l’énergie à l’échelle nano-
métrique par effet piézoélectrique, thermoélectrique
ou photovoltaïque. Il reste que ces phénomènes ne
permettent pas, par eux-mêmes, de générer des
signaux alternatifs. Or, si l’on en croit la bible de
l’électronique, à savoir l’ « Horowitz » [1], en intro-
duction sur les oscillateurs : « an oscillator of some
sort is as essential an ingredient in electronics as a
regulated supply of dc power... a device without an
oscillator either doesn’t do anything or expects to
be driven by something else » (un oscillateur est un
ingrédient aussi essentiel qu’un générateur
continu... un composant sans oscillateur ne fait rien
ou doit être piloté par quelque chose d’autre).
1.1 Signaux alternatifs à l’échelle
nanométrique.
Besoins et applications
Les avantages attendus d’une diminution de la
taille d’un générateur de signaux alternatifs sont :
– la réduction de l’encombrement permettant une
intégration de toujours plus de fonctionnalités dans
le même volume ;
– la réduction de la consommation d’énergie
entraînant une plus grande autonomie ;
– la réduction du coût de fabrication ;
– une augmentation de la rapidité des dispositifs
et donc une augmentation de la plage de fréquence
de fonctionnement.
De tels atouts semblent séduisants pour les appli-
cations en télécommunication avec par exemple le
téléphone portable qui fonctionne à haute fré-
quence, intègre de plus en plus de fonctionnalités et
dont les batteries ne permettent plus une auto-
nomie confortable pour les utilisateurs. Ce n’est
d’ailleurs pas un hasard si les MEMS (
MicroElectro-
Mechanical Systems
) commencent à s’implanter en
téléphonie mobile pour le remplacement de circuits
macroscopiques fondés sur la technologie de
l’oscillateur à quartz.
1.2 Systèmes nanoélectromécaniques,
NEMS
Le développement de systèmes électromécaniques
à l’échelle micrométrique (MEMS), voire même à
l’échelle nanométrique, regroupés sous le nom géné-
rique de NEMS, est en pleine expansion. Plus préci-
sément, un NEMS (pour l’acronyme anglais
NanoElectroMechanical System
) est un composant
qui intègre des éléments mécaniques (résonateurs,
capteurs, actuateurs...) et des éléments de connec-
tique électrique de dimensions nanométriques.
L’objectif est alors de combiner dans ce composant
des signaux électriques et mécaniques pour : filtrer
ou traiter un signal, détecter des paramètres (accé-
lération, pression, température, présence et
concentration d’une molécule...) ou actionner un
élément (interrupteur, micropompe, micromiroirs
orientables...). Suivant l’utilisation souhaitée, des
Pascal VINCENT
est maître de conférences
LPMCN-UCBL.
Anthony AYARI
est chargé de recherche
LPMCN-CNRS.

RECHERCHE
8 - 2008
RE 118
- 2
© Editions T.I.
couplages avec d’autres propriétés physiques sont
également possibles (optique, magnétique, thermi-
que...).
Un NEMS peut, dès lors, être considéré comme la
réduction ultime d’une fonction plus ou moins
complexe, impossible ou difficile à réaliser à partir
d’un système purement électrique ou électronique.
Outres les avantages évoqués au paragraphe pré-
cédent, la réduction d’échelle ouvre l’accès à l’utili-
sation de nouveaux phénomènes apparaissant à
l’échelle nanométrique (force de Casimir, effets
quantiques...) et à une plus grande sensibilité.
Remarquons cependant que dans ces composants
les parties mécaniques sont pour l’instant passives,
c’est-à-dire qu’elles ne font que répondre à une
sollicitation (ou commande) généralement d’origine
électrique.
Encore cet exemple ne représente-t-il qu’une
fonction « simple» : la détection d’une fréquence de
résonance. Afin de profiter au maximum des poten-
tialités de ces nanocomposants, il est beaucoup plus
intéressant de pouvoir concevoir des systèmes plus
complexes et autonomes (c’est-à-dire n’ayant pas
recours à des sources externes macroscopiques)
permettant de réaliser plusieurs types de mesures,
de traiter ces mesures et de pouvoir transmettre les
résultats sous forme optique ou électromagnétique.
On voit donc que le développement de ces sys-
tèmes peut requérir, en plus d’une ou plusieurs ali-
mentations DC (une réserve d’énergie), une
multitude de types de signaux alternatifs suivant les
fonctionnalités envisagées et le traitement des
informations : sources basses fréquences, sources
de fréquences variables, sources hautes fréquences
pour télécommunications. De ce point de vue, il est
intéressant de noter que certains téléphones por-
tables utilisent déjà jusqu’à six types différents de
bases de temps. La multiplication des fonction-
nalités et des signaux spécifiques à certains types
de mesures peut donc rapidement amener à de
réels problèmes d’intégration de ces sources AC.
L’intégration de ces différents signaux alternatifs
pose cependant un certain nombre de problèmes
liés à l’échelle nanométrique que nous allons
exposer au paragraphe suivant et qui amènent à
s’intéresser toujours davantage à la mise au point
de nouvelles sources de courants alternatifs plus
adaptées à ces futurs systèmes.
1.3 Problèmes rencontrés
à l’échelle nanométrique
De manière générale, l’acheminement d’un signal
alternatif est d’autant plus difficile que la fréquence
augmente et le fait de réduire les dimensions du
circuit ne facilite pas cette tâche. On peut citer par
exemple de sérieux problèmes d’accord d’impé-
dance car les objets nanométriques sont souvent
très éloignés des 50
Ω
utilisés comme standard,
mais également les fortes pertes liées à la dégra-
dation du facteur de qualité des résonateurs nano-
métriques. Une autre source de problèmes provient
de la faiblesse des signaux à détecter et de la
difficulté à les exploiter.
2. Génération de signaux
alternatifs
Il est relativement facile de réaliser une source
d’énergie débitant de manière constante. C’est le
cas de la pile en électricité. En revanche, la réalisa-
tion d’une source à débit périodique requiert un
mécanisme supplémentaire afin de convertir un
signal continu en un signal alternatif. Dans le cas de
la dynamo, l’énergie dépensée de manière continue
par le cycliste et produisant un mouvement uni-
forme est convertie en un signal électrique de
période liée à la vitesse de rotation de la roue et de
la dynamo. Les paragraphes suivants présentent
différents mécanismes permettant la conversion
d’un signal DC en AC.
2.1 Progrès dans la génération
de signaux électriques alternatifs
Les premières expériences portant sur des
courants alternatifs remontent au milieu du
19
e
siècle et ont conduit à la découverte des ondes
électromagnétiques par Hertz en 1887. Il utilisait
alors un dispositif électromécanique (déjà ! même si
celui-ci contrairement à ceux du paragraphe 1.2,
n’avait rien de nanométrique) constitué d’un éclateur
(deux boules métalliques séparées par un écart
faible) dans lequel les décharges d’une bobine de
Ruhmkorff engendraient des courants alternatifs
grâce à une lame ressort. Ces expériences furent à
Exemple :
prenons le cas de l’utilisation la plus
connue d’un NEMS à savoir la
nanobalance
; la
détection de masses de plus en plus infimes (de
l’attogramme au zeptogramme, voir références [2]
et [3]) est particulièrement intéressante afin
d’atteindre la résolution ultime de la cellule, la
molécule voire l’atome.
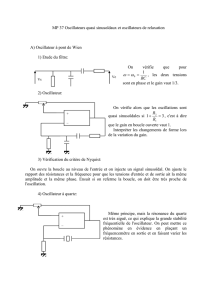
Dans le cas d’un NEMS, le principe physique uti-
lisé est le suivant : une modification de la masse
d’un résonateur (causée, par exemple, par l’accro-
chage sélectif des molécules recherchées) entraîne
une variation des fréquences de résonance de ce
résonateur (voir figure
1
). Ainsi, si
f
0
est la fré-
quence de résonance initiale du résonateur, lors
des mesures, il faut utiliser un signal électrique
d’excitation de fréquence variable pour balayer en
fréquence aux alentours de
f
0
. La réponse du réso-
nateur peut alors être détectée sur une électrode
de mesure et la nouvelle fréquence de résonance,
f
1
, correspondant à la réponse maximale du réso-
nateur, permet de remonter à la variation de
masse. Cette détection requiert donc une source
AC sinusoïdale « de bonne qualité » pouvant fine-
ment balayer les fréquences autour de
f
0
afin de
déterminer des déplacements de fréquence de
résonance les plus fins possibles. Le traitement du
signal de sortie requiert, quant à lui, une partie
électronique qui doit être également alimentée.
Sur le bruit et la dis-
sipation dans les NEMS
voir Phénomène de dis-
sipation dans les
nanostructures [RE 66]
de P. Andreucci et L.
Durrafourg. Base
« Physique-Chimie ».
Si l’on reprend l’
exemple précédent de la
nanobalance
(voir figure
1
), le signal utile est à
la fréquence de résonance du nano-objet qui est
également la fréquence d’excitation. Il faut donc
détecter un signal faible, provenant d’une faible
variation de masse, noyé dans le signal d’entrée
qui fuit directement vers le circuit de détection.

RECHERCHE
© Editions T.I.
8 - 2008
RE 118
- 3
l’origine de l’ère des radio-communications. En 1910,
Edwin Armstrong réalisa qu’un Audion (un des
premiers tubes à vide) pouvait être configuré pour
produire une oscillation beaucoup plus propre que
celle d’un appareil à décharge. De plus, la période
d’oscillation pouvait être contrôlée à l’aide d’une
simple tension continue. On appelle un tel appareil
un VCO (
Voltage Control Oscillator
). Les tubes à vide
furent alors très utilisés pendant de nombreuses
années pour des applications radio, télévision ou mili-
taire. Ils furent ensuite supplantés par les transistors
à base de semi-conducteurs moins volumineux, d’un
moindre coût et nécessitant moins de puissance.
2.2 Génération d’un signal
périodique. Auto-oscillation
La possibilité de générer des signaux électriques
alternatifs amène naturellement à l’étude des
systèmes auto-oscillants
c’est-à-dire des sys-
tèmes capables de provoquer spontanément des
oscillations à partir d’une source d’énergie continue.
Les systèmes auto-oscillants au sens large du
terme peuvent être extrêmement divers. Ils incluent
les horloges, expliquent l’excitation de certains ins-
truments à vent, sont à l’origine des ronflements et
interviennent même dans les battements cardiaques.
Des auto-oscillations peuvent également survenir de
manière inopportune et avoir à des conséquences
catastrophiques (déraillement de Saint-Hélier
(1933), destruction d’aile d’avion, destruction du
célèbre « Takoma Bridge » en novembre 1940).
La compréhension fine des mécanismes
d’auto-oscillation est cependant un domaine qui
peut se révéler rapidement très ardu. Ce domaine
est relié aux problèmes de stabilité (ou d’insta-
bilité), et à la physique non linéaire (une bonne
introduction à ce domaine est donnée en [4]). En
outre, il importe de bien définir les différents types
de couplage existant dans le système étudié. De
plus, des auto-oscillations peuvent apparaître du
fait de couplages que l’on pouvait
a priori
largement
négliger.
Figure 1 – Fonctionnement d’un NEMS comme nanobalance
Fréquence f0Fréquence f1
Signal de sortie
VG
VSD
VG
VG
VG
Fréquence
Bruit
Offset
Signal
f1f0
Amplitude du
signal de sortie
c
a
d
b
e
principe de fonctionnement du composant. Une tension VSD est appliquée aux bornes du nanorésona-
teur et la tension alternative, VG , est appliquée au voisinage de celui-ci. Le signal de sortie permet de détecter
la fréquence de résonance.
lorsque la fréquence d’excitation correspond à la fréquence du résonateur, f0 , celui-ci rentre en
résonance ce qui se traduit par un pic dans l’amplitude du signal de sortie (courbe en noir sur le graphe ).
et une modification de masse du nanorésonateur (représentée ici en rouge au centre du résonateur)
va se traduire par une modification de la fréquence de résonance (courbe en rouge sur le graphe ). L’écart
entre les fréquences f0 et f1 permet de remonter à la valeur de la masse additionnelle.
illustration de l’amplitude du signal de sortie lors des mesures. Pour réaliser une bonne mesure on
voit que le signal de résonance doit être suffisamment important pour être distinguable dans le bruit (voir
partie 1.3).
b
a
d
c
e
e
e

RECHERCHE
8 - 2008
RE 118
- 4
© Editions T.I.
Avant d’illustrer des réalisations expérimentales
nous allons donc présenter les caractéristiques prin-
cipales liées aux phénomènes d’auto-oscillations et
décrire une manière pratique de les représenter et
de les interpréter.
2.2.1 Oscillateur amorti
Considérons pour commencer un système phy-
sique classique, l’oscillateur amorti, dont la loi
d’évolution est donnée par l’équation différentielle :
Avant de chercher à résoudre ce problème,
faisons quelques remarques d’ordre général.
• Un tel système peut représenter un oscillateur
mécanique (système masse-ressort), un
composant électrique (système
RLC
) ou, de
manière plus générale, tout système au
voisinage d’un point d’équilibre stable ;
• Le terme
ω
0
représente la pulsation propre du
système :
pour un système masse-ressort ;
pour un système
LC
.
• Le terme
c
représente, lui, le coefficient de
dissipation (dû par exemple aux frottements
visqueux ou à une résistance électrique). Dans
la pratique
c
est positif et nous considérerons
les valeurs de
c
faibles (nous les noterons par-
fois
ε
).
• On peut réécrire un tel système sous la
forme :
Cela signifie que nous avons ramené notre
équation différentielle d’ordre deux à deux
équations différentielles du premier ordre cou-
plées. Dans le cas du système mécanique
masse-ressort,
x
représente la position et
y
la
vitesse du mobile. On dit qu’un tel système
possède deux degrés de liberté, autrement dit,
il faut connaitre deux conditions initiales pour
remonter à l’unique solution du problème. Pour
représenter l’évolution de notre système au
cours du temps, il est commode d’avoir recours
au plan de phase. Dans ce plan, l’abscisse et
l’ordonnée représentent respectivement les
valeurs de
x
et
y
(voir figure
2
).
Les points d’équilibre de notre système sont
définis comme les points (
x
,
y
) tels que
simultanément. Dans le cas de
l’oscillateur amorti, ils se réduisent au point
unique correspondant au point (0, 0).
• Dans cette équation, il n’y a pas de terme de
forçage c’est-à-dire pas de terme d’excitation
dépendant du temps. Habituellement, un tel
terme est introduit à droite de l’équation sous
une forme
F
cos(
ω
t
). On dit que notre système
est
autonome
c’est-à-dire que, même si les
grandeurs dépendent du temps, il n’y a pas de
dépendance explicite en temps dans l’équation.
Une fois ceci posé on peut enfin chercher la
solution de notre problème et la représenter.
Regardons en particulier quelle est la représentation
de cette solution dans le plan de phase.
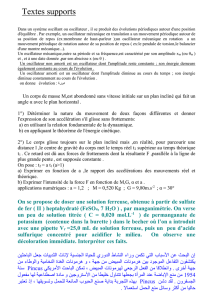
Étant donné notre point de départ (
x
0
,
y
0
) la
solution est une spirale logarithmique qui tend vers
la solution (0, 0) comme montré sur la figure
2
a
. Le
sens des flèches indique le sens positif du temps.
Ici, quel que soit le point de départ, on arrive dans
tous les cas au point (0, 0). On dit que ce point est
stable.
2.2.2 Oscillateur de Van der Pol.
Changement de signe de la dissipation
Imaginons maintenant que l’on fasse agir une
force extérieure de la forme où
F
est positif
(par exemple, introduit par une résistance négative)
et regardons l’effet de cette force lorsqu’on aug-
mente la valeur de
F
en partant de zéro. L’équation
se réécrit :
Tant que (
c
–
F
) reste positif le point (0, 0) est
toujours stable, la solution tend juste plus lente-
ment vers ce point. Lorsque le terme (
c
–
F
)
devient négatif la situation change radicalement et
la trajectoire devient une spirale logarithmique
s’éloignant du point d’équilibre (figure
2
b
). Le point
(0, 0) reste un point d’équilibre, mais ce point
d’équilibre devient instable : toute modification
aussi petite soit-elle par rapport à l’origine fait
diverger la solution. On voit dans ce cas que le sys-
tème absorbe bien de l’énergie et que l’amplitude
d’oscillation augmente, mais, on ne peut pas parler
d’auto-oscillation car le système ne revient pas
Figure 2 – Diagramme de phase représentant
les évolutions possibles d’un oscillateur linéaire
de la forme
x
y
x
y
(x0 , y0)
acas (c – F) > 0 bcas (c – F) < 0
si (c – F ) est positif (système dissipatif), quelle
que soit le point de départ (x0 , y0) la solution est
une spirale logarithmique tendant vers le point
(0,0).
si (c – F ) est négatif
(on parle de résistance
négative) le point (0,0) est stable mais tout écart
aussi faible soit-il fera diverger la solution
(trajectoire allant à l’infini).
Le cas particulier
(c – F )
= 0, ne correspondant pas
à proprement parler à une auto-oscillation, est
volontairement omis.
b
a
xcFx x+− + =() 0
0
2
xcx x++ =
ω
0
20
ω
0=k
m
ω
0
1
=
LC
xy yfxy xcy== =−− (, ) et
ω
0
2
xy==00 et
Fx
xcFx x+− + =()
ω
0
20

RECHERCHE
© Editions T.I.
8 - 2008
RE 118
- 5
périodiquement sur la même trajectoire. Dans la
pratique cette divergence de la solution pourrait
mener à une catastrophe dans le système.
Comment pourrait-on transformer le système
pour avoir une limitation des trajectoires par
exemple dans le cas de la figure
2
b
? On voit qu’il
est inutile de rajouter un terme linéaire qui ne peut
au mieux que faire basculer le système entre les
états (
a
) et (
b
). Voyons donc l’effet que peut avoir
une contribution non linéaire.
Soit le système défini par l’équation
différentielle :
Ce système est très proche du précédent. Il s’agit
de l’équation bien connue de Van der Pol (qui intro-
duisit cette équation pour l’étude des battements
cardiaques en 1928, [5]). On voit alors que le
terme d’amortissement est gouverné par deux
tendances :
– si
x
2
< 1 alors le terme 1 domine et l’amor-
tissement est négatif (cas de la figure
2
b
). Donc le
système proche du point d’équilibre est instable ;
– dans le cas contraire,
x
2
> 1, l’amortissement
devient positif et donc les trajectoires se rap-
prochent du point d’équilibre.
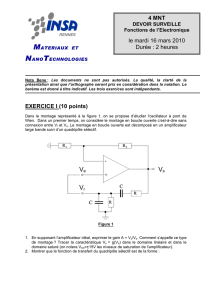
La figure
3
a
illustre les trajectoires qui résultent
d’un tel système et montre (en noir) l’orbite limite
correspondant à l’auto-oscillation qui apparaît dans
le système. Nous avons également représenté les
évolutions du système en fonction du temps pour
différentes valeurs de
ε
ce qui correspond à dif-
férentes intensités de la dissipation durant le mou-
vement (figure
3
b
). On remarque que la forme du
signal auto-oscillant peut être très proche d’une
sinusoïde ou au contraire très différente. En fait,
des oscillations proches d’une forme sinusoïdale
apparaissent dans les systèmes dans lesquels la
perte d’énergie durant une période est faible (faible
valeur de
ε
et, de même, l’énergie injectée dans
l’oscillateur est faible) ou dans des systèmes où les
pertes d’énergie sont compensées en permanence.
Au contraire, lorsque la dissipation est élevée et
que quasiment toute l’énergie du système est
échangée au cours d’un cycle, l’évolution peut être
extrêmement éloignée d’une forme sinusoïdale (voir
la courbe pour
ε
= 10) et l’on parle en général
d’oscillations de relaxation.
Un autre point important est que la fréquence des
auto-oscillations est très proche de la fréquence de
résonance du système (ici
ω
0
). Dans une
auto-oscillation c’est le système qui impose la fré-
quence d’oscillation, au contraire d’un système
forcé où la fréquence est fixée par l’excitation exté-
rieure. Un système auto-oscillant régule lui-même
ses échanges d’énergie avec l’extérieur à sa propre
fréquence. Sur la figure
3
on voit que pour
ε
= 2
(déjà très loin de l’hypothèse
ε
petit !) l’écart en
fréquence reste encore faible.
2.2.3 Oscillateur défini par morceaux
Un autre cas assez fréquent pouvant générer des
auto-oscillations est caractérisé par des systèmes
dont l’évolution est définie par morceaux. De tels
systèmes peuvent survenir lorsqu’un changement
de paramètre se fait de manière abrupte
Figure 3 – Oscillateur de Van der Pol : diagramme de phase et évolution du système en fonction du temps pour
différentes valeurs de
x (t)
Temps t
b
y (u.a.)
x (u.a.)
a
b
a,
noir marron
xx x x+−+=
εω
()
20
2
10
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%