Machine synchrone autopilotée

1
Machine synchrone autopilotée : application aux asservissements : moteur brushless
Cours non exhaustif destiné aux étudiants de BTS maintenance industrielle (les textes en italiques ne
sont pas à être pris en compte par les élèves)
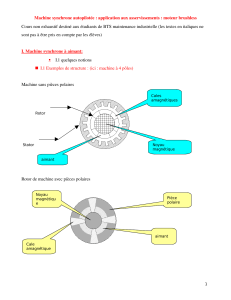
I. Machine synchrone à aimant:
I.1 quelques notions
I.1 Exemples de structure : (ici : machine à 4 pôles)
Machine sans pièces polaires
Rotor de machine avec pièces polaires
Cales
amagnétiques
aimant
Noyau magnétique
Pièce
polaire
aimant
Noyau
magnétique
Cale
amagnétique
Stator
Rotor

2
La forme d’onde d’alimentation de la machine dépend de sa structure magnétique : on rencontre des
champs à répartitions spatiales sinusoïdales (machines à pôles saillant : entrefer variable, d’arc polaire
120°)ou trapézoïdale (machines à pôles lisses d’arcs polaires 180° alimentés par des créneaux de
courant à 120° ou d’arc polaire 120° alimentés par des créneaux de courant à 180°).
On alimentera la machine soit par des créneaux de courant (champ trapézoïdal) soit par des ondes
sinusoïdales (champ sinusoïdal)
I.3 Calcul du couple électromagnétique d’une machine synchrone en régime permanent.
a) Hypothèses :
machine à pôle lisse
machine non saturée
Aimant permanent :rotorique=cte
Nous supposerons pour des raisons de simplicité la machine alimentée par des courants
sinusoïdaux

3
b) Schéma électrique équivalent :
Le champ tournant statorique tourne à ws=2fs avec fs fréquence d’alimentation du stator
Le champ tournant rotorique tourne à w=2n.p avec n fréquence de rotation (mécanique) du rotor.
Pour que cette machine fonctionne, il faut synchronisme des champs :
ws=w en régime permanent.
c) Diagramme espace temps
jLws.Is
Rotor
Br
Is
V
Ev
Ev
V
Is
Lws
V= Ev + jLws * Is
M3
Fem induite
dans le stator
par le champ
rotorique (liée
au rotor)
Alimentation
du stator
STATOR
ROTOR

4
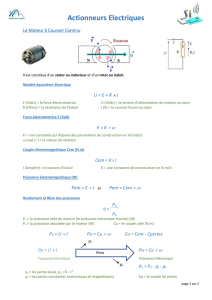
d) Calcul :
P= 3Ev.Is.cos Cem=P/s=3Ev.Is.cos/s
avec Ev proportionnelle à ws (Ev=kws) et s=ws/p, on obtient :
Cem= 3.p.k.ws.cos/ws=3pkIs cos
Avec k=3pr
Autre expression :
P=3.V.I.cosCem=3pVIcos/ws
avec lwsIscos=Evsin, on obtient Cem=3pEvsin/L(ws)²
or Ev=k.ws donc Cem=3pk(V/ws)sin.
I.4. remarques sur les machines à pôles saillants :
Vqs = Ev + Xds Ids
Vds = Xqs . Ids
Vs = Ev + Xds. Ids + j Xqs Iqs
Avec Vs= Vds + j Vqs et Is = Ids + jIqs
Cem=K.Is.cos
Cem=K(V/ws)sin.
Xqs.Iqs
Xds.Ids
EV
Vs
Vds
Vqs
Ids
Iqs
Axe d
Axe q
Cem=3.p.
r.Is.cos
- 3/2.p.(lds-lqs).Is².sin(2
)

5
II. La machine synchrone alimentée à fréquence variable.
La fréquence de rotation d’une machine synchrone dépend uniquement de sa fréquence d’alimentation :
n=fs/p
Nous étudieront 2 cas :
Alimentation en tension à fréquence variable
Alimentation en courant à fréquence variable.
1) Alimentation en tension.
Vs/fs=cte : on fonctionne à flux constant et nominal
ws=2fs
On augmente ws w ne varie pas instantanément (inertie).
1) augmente sin augmente Cem=ksin augmente si le couple moteur augmente, le
synchronisme peut s’établir à nouveau
2) Si dépasse /2 sin diminue Cem=ksin diminue si le couple moteur dimùinue w
diminue, il n’y a plus synchronisme des champs : on a un décrochage.
Vs
Ev
w
ws
MS
3
fs
Vs
Onduleur
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%