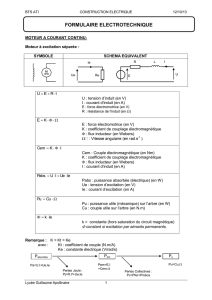
Modèle équivalent électrique

Actionneurs Electriques
page 1 sur 2
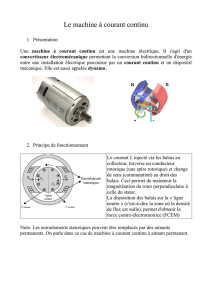
Le Moteur à Courant Continu
Il est constitué d’un stator ou inducteur et d’un rotor ou induit.
Modèle équivalent électrique
U = E + R
I
E (Volts) = la force électromotrice U (Volts) = la tension d’alimentation du moteur au rotor
R (Ohms) = la résistance de l'induit I (A) = le courant fourni au rotor
Force électromotrice E (Volt)
E = K
K = une constante qui dépend des paramètres de construction en V/(rad/s)
(rad.s-1) = la vitesse de rotation
Couple électromagnétique Cem (N.m)
Cem = K
I
I (Ampère) = le courant d'induit K = une constante de construction en N.m/A
Puissance électromagnétique (W)
Pem = E
I et Pem = Cem
Rendement et Bilan des puissances
=
Pu = la puissance utile du moteur (la puissance mécanique fournie) (W)
Pa = la puissance absorbée par le moteur (W) Cu = le couple utile (N.m)
Pa = U
I Pu = Cu
Cu = Cem - Cpertes
Pa = U
I Pu = Cu
Puissance Electrique Puissance Mécanique
Pu = Pa - pj - pc
pj = les pertes Joule, pj = R
I 2
pc = les pertes constantes (mécaniques et magnétiques) Cp = le couple de pertes
Pu
Pa
pj
Pem
pc

page 2 sur 2
Modes de fonctionnement
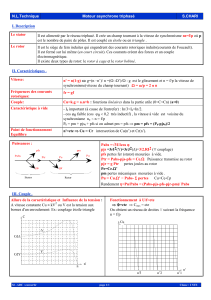
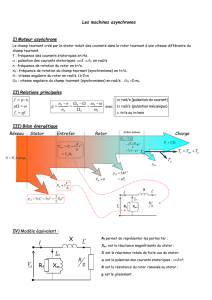
Le Moteur Asynchrone
Le moteur est alimenté par un réseau de tension triphasé.
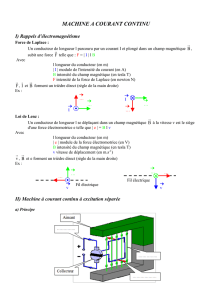
Il est constitué d’un stator ou inducteur et d’un rotor ou induit.
Vitesse de synchronisme (Ns)
Ns =
Ns = la vitesse de synchronisme (tr/min) f = la fréquence de la tension (Hz)
p = le nombre de paire de pôles.
Exemple : Pour 50Hz et p=1 : Ns=3000tr/min; pour 60Hz et p=1 : Ns=3600tr/min.
Glissement (g)
g = =
g = le glissement,
N = la vitesse du rotor (tr.min-1) = la pulsation du rotor (rad.s-1)
Ns = la vitesse de synchronisme (tr.min-1) S = la pulsation de synchronisme (rad.s-1)
Rendement et Puissances
= Pa =
3
U
I
cos
Pu = Cu
Pu = la puissance utile du moteur (la puissance mécanique fournie) (W)
Pa = la puissance absorbée par le moteur (W) Cu = le couple utile (N.m)
est le déphasage courant / tension (en ° ou en rad), U la tension entre phases et I le courant en ligne
60 f
p
Ns - N
Ns
s -
s
Pu
Pa
1
/
2
100%