C3_sinusoidal

1
Chapitre 3
REGIME ALTERNATIF SINUSOIDAL

2
I. Introduction
On entend par régime sinusoïdal le régime permanent qui s’établit après la mise sous tension d’un
circuit linéaire en réponse à une entrée (source de tension ou de courant) sinusoïdale. D’un point de
vue mathématique, ce régime correspond à la SPET des équations différentielles qui régissent le
circuit : toutes les grandeurs électriques sont donc supposées sinusoïdales.
)tcos(2U)t(u u
;
)tcos(2I)t(i i
Déphasage de i par rapport à u :
tt
T
2
iuu/i
positif i en retard par rapport à u
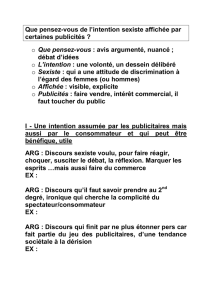
II. Vecteurs de Fresnel
1) Définition
u(t) est la projection horizontale d’un vecteur de norme
2UU
tournant à la vitesse
angulaire et faisant un angle u à l’instant t=0 avec l’axe de projection. On représente
généralement les vecteurs de Fresnel associés à différentes grandeurs (de même pulsation donc
tournant à la même vitesse) à l’instant t=0, faisant ainsi un angle égal à leur phase à l’origine
par rapport à l’axe de projection :
En pratique, la norme du vecteur est associée à la valeur efficace plutôt qu’à la valeur
maximale de la grandeur représentée.
i
u
I
U
t
2
T
t
i
cos2I
u(t), i(t)
axe de projection
= angle
)U,I(
u
cos2U
2UU
ˆ

3
2) Equivalence des opérations
Addition : u(t)=u1(t)+u2(t)
21 UUU
Multiplication par une constante : u(t)=ku1(t)
1
UkU
Dérivation:
)
2
tcos(2U)tsin(2U
dt )t(du
)t('u uu
'U
est obtenu
en faisant tourner
U
de
2
et en multipliant sa longueur par
Intégration :
)
2
tcos(
1
2U
)tsin(
2Udt)t(u u
u
l’opération
intégration se traduit donc par une rotation de
2
et une division par de la norme du
vecteur initial
II. Nombres complexes
On associe à la tension
)tcos(2U)t(u u
le nombre complexe
u
j
UeU
On obtient facilement les équivalences :
Uj
dt )t(du
et
U
j1
dt)t(u
III. Impédance
1) Définitions
Pour tout dipôle ou association de dipôles passifs linéaires, on peut définir une impédance
I
U
Z
et une admittance
Z
1
U
I
Y
Z et Y étant des nombres complexes, ils leur correspondra toujours une forme algébrique du
type :
Z = R + jX R (partie réelle) : résistance en ; X (partie imaginaire) : réactance en
avec
22 XRZ
et
)
R
X
tan(Arc)Z(Arg
Y = G + jB G : conductance en Siemens (S); B : susceptance en Siemens
avec
22 BGY
et
)
G
B
tan(Arc)Y(Arg
I
U
Z

4
A partir des définitions de Z et Y, on a :
- Arg(Z) =Arg(U)-Arg(I)=u-i= (déphasage de i(t) par rapport à u(t)) et
Z
R
cos
- Arg(Y)=-Arg(Z)=-
-
222222 XR jX
XR R
XR jXR
Z
1
Y
donc
222 Z
R
XR R
G
et
222 ZX
XR X
B
En utilisant les formules de puissance active P=UIcos et réactive Q=UIsin on obtient :
-
22 UGIRP
-
22 UBIXQ
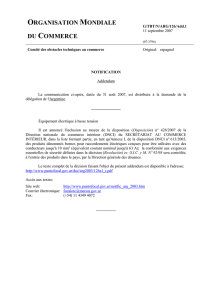
2) Impédance des dipôles élémentaires
)t(iR)t(u
IRU
dt)t(di
L)t(u
IjLU
dt )t(du
C)t(i
UjCI
dt)t(di
L)t(ir)t(u
I)jLr(U
RZ
R
1
Y
jLZ
Lj
jL
1
Y
Cj
jC
1
Z
jCY
jLrZ
2222 )L(r jL
)L(r r
jLr1
Y
0
u/i
2
u/i
2
u/i
)
r
L
tan(Arc
u/i
R
U
RIP2
2
0Q
0P
L
U
ILQ 2
2
0P
22 UCI
C
1
Q
2
22
2U
)L(r r
IrP
2
22
2U
)L(r L
ILQ
Remarques :
- une bobine consomme de la puissance réactive (Q > 0 en convention récepteur)
- un condensateur fournit de la puissance réactive (Q<0 en convention récepteur
R
L
C
r
L

5
IV. Association de dipôles
Dipôles en série :
...ZZZZZ 321ieq
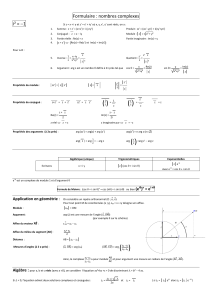
Dipôles en parallèles :
...YYYYY 321ieq
(attention :
...YYY 1
Y
1
Z
321
eq
eq
)
Quand il n’y a que deux impédances en parallèle, on peut obtenir directement l’impédance
équivalente à l’aide de la relation :
21
21
eq ZZ ZZ
Z
V. Etude d’un circuit
1) En utilisant des relations complexes
A partir du schéma électrique équivalent, il faut rechercher autant de relations complexes
indépendantes qu’il y a d’inconnues à déterminer. Le système d’équations obtenu peut être
résolu soit de manière algébrique (on utilise les nombres complexes jusqu’à la fin) soit à l’aide
d’un diagramme de Fresnel.
Pour établir les différentes relations, il faut utiliser toutes les lois et les théorèmes à
disposition :
- loi des mailles pour les tensions
- loi des nœuds pour les courants
- théorème de Thévenin/Norton
- théorème de Millman
- formule du pont diviseur de tension
- formule du pont diviseur de courant
2) En utilisant le théorème de Boucherot
Conservation de la puissance active :
récepteursoninstallati PP
Conservation de la puissance réactive :
récepteursoninstallati QQ
Attention : la puissance apparente n’est pas conservée :
2oninstallati
2oninstallationinstallati QPS
oninstallati
oninstallati
oninstallati
oninstallati
pcos
S
P
f
Z1
Z2
Zeq
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%