Mesure du temps et oscillateurs - leprof

Page 1 sur 5
Chap. B3 Mesure du temps et oscillateurs
I. Travail d'une force
1. Définition
Le travail WAB(
F
) d'une force constante
F
, lors d'un déplacement de son
point d'application de A vers B, est égal au produit scalaire de la force
F
par le vecteur déplacement
AB
.
WAB(
F
) =
F
.
AB
= F . AB cos où est l'angle entre les vecteurs
F
et
AB
.
WAB(
F
) est en joule (J), F en newton (N) et AB en mètre (m).
Le travail est dit moteur (W> 0) si la force favorise le déplacement,
résistant (W < 0) si elle s'oppose au déplacement. Il est nul si la direction
de la force est perpendiculaire à celle du déplacement.
2. Travail du poids
Le travail d'un poids d'un corps est indépendant du chemin suivi par son
centre d'inertie G pour aller du point de départ A au point d'arrivée B. Il
ne dépend que leurs altitudes zA et zB.
WAB(
P
) =
P
.
AB
= mg (zA -zB)
Le travail est en J, m en kg, g en N.kg-1 et (zA -zB) en m. L'axe (Oz) est
orienté vers le haut.
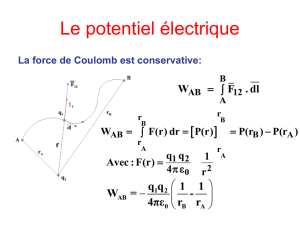
3. Travail d'une force électrique
Une particule de charge électrique q, placée dans un champ électrostatique
uniforme E, est soumise à une force électrique
e
F
constante d'intensité
Fe = |q|× E.
Lors du déplacement de A à B d'une particule dans un champ électrostatique
uniforme, le travail WAB(
e
F
) de la force électrique
e
F
exercée a pour
expression : WAB(
e
F
) =
e
F
.
AB
=Fe×AB× cos = |q|× E×AB× cos
avec q, charge électrique portée par la particule en coulomb (C) ; E, intensité
du champ électrique en volt par mètre (V.m-1).
Un champ électrostatique uniforme E est produit entre deux points A et B par une tension électrique
UAB (en V) appliquée entre ces deux points : UAB =
E
.
AB
. L'expression du travail de la force
électrique
e
F
devient alors : WAB(
e
F
) = q
E
.
AB
= q × UAB
La valeur et le signe du travail de la force électrique dépendent uniquement de ceux de q et de UAB, et
non du chemin suivi par la particule entre A et B
II. Transferts énergétiques
1- Energie cinétique
Pour un point matériel de masse m et de vitesse v: L’énergie cinétique de ce point dans ce référentiel
est donné par
EC = ½ m v²

Page 2 sur 5
Un solide est en mouvement de translation si tous les points de ce solide on le même vecteur vitesse.
Pour un solide de masse M animé d'un mouvement de translation caractérisé par la vitesse vG de son
centre d'inertie
EC = Eci = ½ mi vi²
mi = masse totale du solide = M
vi² = vitesse du solide car toutes les vitesses sont identiques.
Ceci ne s’applique que dans le cas d’un solide en translation.
EC est en J, m en kg et v en m.s-1
2- Théorème de l’énergie cinétique
Dans un référentiel galiléen, la variation d'énergie cinétique d'un solide est égale au travail des forces
extérieures qui lui sont appliquées pendant la durée de cette variation.
Pour un solide en translation :
C
BAE
= EC(B) - EC(A) = ½ MVB² - ½ MVA² =
)F(W extAB
3- Energies potentielles
L'énergie potentielle d'un système est liée à la position des éléments qui le composent.
a) Energie potentielle de pesanteur
L'énergie potentielle de pesanteur d'un solide de masse M et de centre d'inertie G, repéré par la
coordonnée zG , a pour expression Epp = MgzG
EPP est en J, g en N.kg-1 et zG en m.
L'axe vertical (Oz) est orienté vers le haut.
Lorsque le centre d'inertie d'un solide passe de la position A à la position B, le travail du poids est lié à
la variation d'énergie potentielle de pesanteur:
WAB(
P
) = mg (zA -zB) = EPP (A) - EPP (B) = EPP
Lorsqu'un solide passe d'un état de repos à un autre état de repos pour lequel l'altitude de son centre
d'inertie zG est plus élevée, il acquiert une énergie potentielle positive qu'il pourra restituer.
Cette énergie est égale à l'opposé du travail de son poids, c'est à dire à la valeur minimale du travail
effectué par un opérateur pour l'amener dans sa position haute.
b) Energie potentielle élastique
Lorsqu'un ressort est comprimé ou étiré, il peut fournir un travail. Il restitue alors l'énergie
emmagasinée lors de sa déformation.
Cette énergie est égale au travail de la force
f
qui a permis de le déformer.
Lorsque la longueur du ressort varie de l0 (longueur à vide) à l0 + x, le travail de la force f est :
W(
f
) = ½ k x²
Cette expression est aussi celle de l'énergie potentielle élastique.
L'énergie potentielle élastique d'un ressort, de constante de raideur k, est proportionnelle au carré de
son allongement x
EPe =
2
1
k x² Epe est en J, k en N.m-1 et x en m.
Les ressorts utilisés en classe ne sont pas les seuls à pouvoir stocker de l'énergie potentielle élastique.
Le ressort spiral d'une montre mécanique ou celui d'un jouet sont aussi des réservoirs d'énergie ; il en
est de même des matériaux élastiques.
EC = ½ M vG²
EC /Rgal = WM(
ext
F
)

Page 3 sur 5
c) Energie potentielle électrique
L'expression du travail de la force électrique
e
F
est : WAB(
e
F
) = q
E
.
AB
= q × UAB
Or UAB est une différence de potentiel entre le point A et le point B UAB = VA - VB
WAB(
e
F
) = q ×(VA - VB) = qVA – qVB
Par analogie avec la force de pesanteur, en choisissant une origine des potentiel son peut définir
l’énergie potentielle électrique d’une particule de charge q en un point de potentiel V par
Epél = q×V et WAB(
e
F
) = qVA – qVB = - (qVB – qVA) = - (Epél B – Epél A) = - Epél
4- Energie mécanique
Si les frottements peuvent être négligés, les variations d'énergie potentielle compensent les variations
d'énergie cinétique.
L'énergie mécanique EM d'un système est égale à la somme des énergies cinétique et potentielle:
EM = EC+ EP
5- Forces conservatives
Si les frottements peuvent être négligés, il y a conservation de l'énergie
mécanique. Des forces sont conservatives si le travail ne dépend pas du
chemin suivi
Pour un solide ayant atteint sa vitesse limite de chute dans un fluide
visqueux, son énergie cinétique ne varie plus. En revanche, son énergie
potentielle diminue. Il en est de même de son énergie mécanique.
Pour un dispositif solide ressort horizontal amorti, la somme des
énergies cinétique et potentielle, diminue avec le temps.
Lorsqu'un système est soumis à des frottements, son énergie mécanique
ne se conserve pas.
EM =
)F(W f
III. Etude énergétiques des oscillations libres
Un système oscillant est un système mécanique de centre d'inertie G, dont le mouvement:
- est périodique, c'est-à-dire qu'il se reproduit identique à lui-même, à des durées égales;
- s'effectue de part et d'autre d'une position d'équilibre stable.
1- Pendule simple
Il est constitué d'un objet de masse m accroché à une extrémité d'un fil inextensible ou d'une tige
rigide, de masse négligeable devant celle de l'objet. Le centre de gravité du système est alors confondu
avec celui de l'objet.
Si les dimensions de l'objet sont très petites devant la longueur du fil et sa masse très supérieure à cette
du fil, on peut considérer l'objet comme ponctuel.
La période propre d'un oscillateur caractérise ses oscillations libres en l'absence de tous
frottements. Pour les faibles amplitudes T0 =
g
l
2
2- Pendule élastique
Lorsqu'on suspend, par exemple, un solide à un ressort vertical à spires non jointives et de longueur à
vide l0, l'interaction entre le ressort et le solide se traduit, d'après la loi des actions réciproques
(troisième loi de Newton), par deux forces opposées.

Page 4 sur 5
La force
T
exercée par le solide sur le ressort est appelée tension du ressort : c'est la force qui maintient
le ressort étiré. La force
R
exercée réciproquement par le ressort sur le solide est appelée force de
rappel. Elle a pour caractéristiques :
- direction : l'axe du ressort ;
- sens : orientée vers l'intérieur du ressort quand celui ci est étiré et vers l'extérieur du ressort quand
celui ci est comprimé ;
- point d'application : le point d'accrochage du ressort
- valeur : R, exprimée en newton, proportionnelle à la valeur absolue de l'allongement l du ressort (en
m) : R = kl = k (l – l0) avec l0 longueur du ressort à vide.
La constante k, appelée constante de raideur du ressort, s'exprime en N.m-1 ou en kg.s-2.
L’expression de R est valable quels que soient l’état de mouvement du ressort, sa position et l'origine
de son allongement.
La force de rappel R, exercée par un ressort de raideur k sur un solide, est égale à
AAkR 0
La période propre T0 d'un pendule élastique a pour expression T0 =
k
m
2
Le système étudié est le mobile, de masse m et de centre d'inertie G, dans le référentiel terrestre
considéré galiléen.
Pour repérer la position de G au cours du mouvement, on
oriente l’axe horizontal parallèle au déplacement et on
choisit comme origine O des abscisses la position
d'équilibre du solide : à chaque instant, le vecteur
OG
est donc égal à x
i
.
Le mobile est soumis à trois forces
- son poids
P
, vertical et orienté vers le bas, de valeur P = mg
- la réaction verticale
r
du rail à coussin d'air, verticale et orientée vers le haut, qui compense
exactement le poids P du mobile en l’absence de frottements ;
- la force de rappel
R
du ressort unique équivalent, dirigée selon l'axe du système, égale à – k.x
i
.
En appliquant La deuxième loi de Newton au système, on obtient
ext
F
=
P
+
r
+
R
= m
a
, avec
P
+
r
=
0
, soit :
R
= m
a
.
En remplaçant les vecteurs
R
et
a
par leurs expressions, on a donc – k.x
i
= m
x
i
où
x
est la dérivée
seconde de x par rapport au temps.
Au cours des oscillations libres du pendule, l'écart à l'équilibre x du centre d'inertie du mobile vérifie
l'équation différentielle du deuxième ordre
x
+
m
k
x = 0. (1)
Remarque : cette équation différentielle du deuxième ordre est valable de la même manière pour un
pendule élastique vertical si les frottements sont négligeables.
Si on ne néglige pas les frottements, l’équation devient :
²dtx²d
+ 2
dt
dx
+ 0² x = 0
où 0 et désignent respectivement la pulsation propre et le coefficient d'amortissement. 0 et sont
deux constantes positives caractéristiques du système, ces deux constantes s'expriment en rad.s-1.
0 =
0
T
2
=
m
k
ou 0 =
g
pour le pendule
3- Dissipation d’énergie
Si on fixe sur le mobile une plaque de masse négligeable qui frotte dans l’air, l’amplitude des
oscillations décroît d'autant plus rapidement que les frottements sont importants : Le mouvement est
pseudo périodique. La pseudo-période T est supérieure à la période propre T0.

Page 5 sur 5
Plus les frottements sont faibles, et plus T se rapproche de T0. Lorsque les frottements augmentent, le
nombre d'oscillations diminue. Puis, à partir d'une certaine valeur, le mobile revient dans sa position
d'équilibre sans osciller : le régime est apériodique.
Les frottements amortissent les oscillations. La pseudo période T du mouvement amorti tend vers la
période propre T0 du pendule lorsque les frottements diminuent.
Rappelons qu'un système physique, quelque soit son type mécanique, électrique ou autre, est un
système amorti. Il perd de l'énergie par des phénomènes de dissipation (amortissement, frottement,
effet Joule...) L'énergie totale du système décroît au cours du temps.
Energie dissipée au cours d'une pseudo-période :
Un oscillateur harmonique amorti est caractérisé par la pulsation 0 et le coefficient d'amortissement ,
ou par la pulsation propre 0 (ou la fréquence propre f0 =
20
) et le facteur de qualité Q.
Considérons un système amorti évoluant en régime pseudo-périodique ( < 0) de pseudo-période T1.
Désignons par E(tn) l'énergie totale de cet oscillateur à un instant tn correspondant à un extrémum des
oscillations et par E = E(tn + T1) - E(tn) l'énergie dissipée par l'oscillateur entre les instants tn et tn +
T1. L'instant tn
Dans le cas de l'amortissement très faible ( << 0) : Q =
20
E)t(E
2n
.
Dans ce cas, les deux définitions du facteur de qualité Q =
20
et Q =
E)t(E
2n
sont très peu
différentes et la perte d'énergie en valeur relative s'écrit
)t(E
E
n
=
Q
2
.
Plus le facteur de qualité est grand, moins le système dissipe de l'énergie.
IV. Définition et mesure du temps
Les phénomènes astronomiques périodiques servent de référence à la mesure du jour et de l'année
depuis la Préhistoire.
Les systèmes mécaniques oscillants (horloges, montres...) ont permis à l'Homme de mesurer des durées
plus petites en se substituant aux repères périodiques naturels (jours, saisons...).
Alors que les systèmes mécaniques oscillants subissent des phénomènes dissipatifs, le quartz vibre
toujours quasi rigoureusement à la même fréquence (32768 Hz) lorsqu'il est traversé par un courant.
L'horloge atomique de référence est celle au césium. La fréquence étalon est la fréquence stable du
rayonnement qui accompagne la transition entre deux niveaux d'énergie, parfaitement connue, de
l'atome de césium telle que E = h.
La seconde est actuellement définie comme la durée d'exactement 9 192 631 770 périodes de la
radiation correspondant à la transition entre deux niveaux particuliers de l'atome de césium 133.
Cette transition est facilement réalisable et très stable. L'atome ne s'use pas : il est donc judicieux
d'utiliser des horloges atomiques pour mesurer le temps.
Le temps atomique international (TAI) est établi en effectuant la moyenne des informations provenant
de plusieurs centaines d'horloges atomiques réparties en différents endroits du globe.
Le TAI est l'échelle de temps la plus précise jamais réalisée. Le temps légal, utilisé dans tous les pays
et nommé UTC (temps universel coordonné), découle du TAI mais s'oblige à maintenir une cohérence
avec l'alternance des jours et des nuits, en effectuant des correctifs au besoin (pour que midi reste au
milieu de la journée et minuit, au milieu de la nuit).
1
/
5
100%