Montage 10

TP 10 Expériences, à l'aide d'un dispositif à coussin d'air,
sur la conservation de la quantité de mouvement et sa
variation dans quelques cas simples.
Introduction :
Par définition, la quantité de mouvement d’un point matériel de masse m animé d’une vitesse
v
est
vmp
. Pour un système de points matériels est sera
iiiS vmp
.
Le mouvement d’un système est régit par la 2nde loi de Newton
dt
pd
amF
ii
Le système sera dit isolé si il n’est soumis à aucune force, ou pseudo-isolé si la somme vectorielle
des forces appliquée est nulle. En conséquence la quantité de mouvement sera constante, c’est ce
que nous allons voir dans un premier temps.
Nous supposerons le référentiel du laboratoire galiléen !!
I) Conservation de la quantité de mouvement
1) Mouvement rectiligne uniforme
Manip à faire en dernier si le temps car c’est peu pertinent
cstep
dt
pd
amRP 00
Mobile autoporteur seul
2) Choc élastique (Dico, Duffait)
Le système est constitué des 2 mobiles autoporteurs, c’est donc ici un système déformable !!
Ces mobiles autoporteurs sont munis d’anneaux élastiques
Vérifier la conservation de la quantité de mouvement totale
P
et aussi de l’énergie cinétique Ec
Montrer le mouvement rectiligne uniforme de G
Tout se passe comme si l’on étudiait le mouvement d’un point matériel fictif de masse celle de
l’ensemble du système et de quantité de mouvement la somme des 2 mobiles pris séparément
On pourra également construire les vecteurs
p
au moment du choc, et dire que la force
responsable de cette variation de quantité de mouvement est une force intérieure au système
que l’on a définit, d’où l’importance de définir avec précision le système que l’on étudie.
3) Choc inélastique (Dico, Duffait)
Mobiles avec velcro restant collés
Vérifier la conservation de la quantité de mouvement et cette fois-ci la non conservation de Ec

II) Variation de la quantité de mouvement
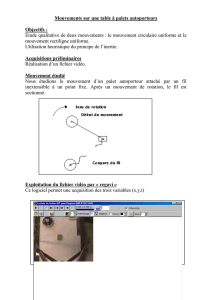
1) Mouvement circulaire uniforme (Duffait)
Le mobile est soumis à une force centripète
dt
pd
e
R
V
mamf rr
2
Il n’est donc plus pseudo-isolé
Tracer 2 vitesses
Vérifier que V = cte en module d’où le nom de mouvement uniforme
Tracer l’accélération et comparer à la théorie
2) Mouvement parabolique sur un plan incliné (Duffait, Fontes)
Il est plus parlant de faire cette manipulation manuellement
On commence par repérer la ligne de plus grande pente, en lâchant le mobile du haut de la table
sans vitesse initiale. Ceci permet de tracer précisément l’axe (Oy) ainsi que l’axe (Ox) qui lui est
perpendiculaire. La 2nde loi de Newton s’écrit
RP
dt
pd
; en projection sur les axes (Ox) et
(Oy) on arrive à
0
dt
pd x
et
jmg
dt
pd y
sin
Tout se passe comme si le mobile était pseudo-isolé selon l’axe (Ox) mais soumis à une
accélération selon l’axe (Oy)
Une fois l’enregistrement effectué, on pourra tracer quelques vitesses consécutives.
La projection de ces vitesses sur l’axe (Ox) est une constante !
On pourra ensuite tracer le vecteur
t
p
mt
vvivi
1
211
et voir qu’il est colinéaire à
l’axe (Oy) et que sa norme s’identifie à g sin
Conclusion : Manipulations intéressantes car elles permettent aux élèves de visualiser simplement
les conséquences de la 2ème loi de Newton. Les manipulations de la 2ème partie sont adaptées à des
TS
1
/
2
100%