Le Pendule Élastique : Cours de Physique

1
Le pendule élastique.
Introduction.
On étudiera ici un autre système mécanique, le pendule élastique, ayant un mouvement
oscillatoire.
Après avoir dégager expérimentalement les caractéristiques de ce mouvement ; on se
proposera de retrouver ces caractéristiques en appliquant la 2ème loi de Newton et en réalisant
l’étude analytique du mouvement du pendule élastique.
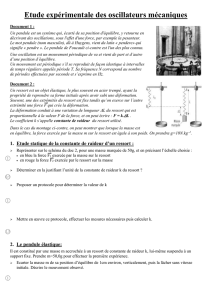
I. Etude expérimentale du pendule élastique (voir Travaux Pratiques).
1. Résultats.
Ecarter de sa position d’équilibre et abandonné à lui-même, un pendule élastique (vertical ou
horizontal) décrit des oscillations mécaniques libres non amorties (si les frottements sont
suffisamment faibles et si l’on observe les oscillations sur une durée relativement courte).
Il oscille de part et d’autre de sa position d’équilibre, avec une amplitude Xm.
Sa position peut être repérée à tout instant t par l’abscisse x du centre d’inertie du pendule
repérée par rapport à sa position d’équilibre O.
On observe alors un régime périodique.
Il y a isochronisme des oscillations du pendule élastique, quelque soit l’amplitude des
oscillations (sans dépasser la limite d’élasticité).
La période des oscillations est indépendante de l’amplitude.
On établie expérimentalement et par analyse dimensionnelle que la période propre du pendule
élastique (vertical ou horizontal) à pour expression :
O ●
Position
d’équilibre
● G
x

2
T0 = 2
k
m
Où m est la masse du pendule élastique et k la raideur du ressort.
2. Visualisation du graphe x (t).
2.a. Dispositif expérimental.
Un pendule élastique horizontal est constitué par un chariot glissant sur un rail horizontal et
relié à un ressort de masse négligeable.
L’abscisse du chariot est déterminée à tout instant t grâce à un capteur photoélectrique.
2.b. Observation du graphe obtenu.
On obtient un graphe ayant l’allure suivante :
On constate que la fonction x (t) est une fonction sinusoïdale du temps d’amplitude Xm et de
période T0.

3
II. Influence de l’amortissement.
1. Dispositif expérimental.
On reprend le dispositif utilisé précédemment en rajoutant une « ailette » en dessous du
chariot qui permet d’accroître le frottement de l’air (amortissement faible) ou le frottement
d’un fluide visqueux (amortissement fort) dans lequel plonge l’ailette.
2. Cas d’un amortissement faible.
Si l’action des forces de frottement est modérée, l’amortissement est faible, l’amplitude des
oscillations observées décroît progressivement dans le temps : on observe des oscillations
mécaniques libres amorties, c'est-à-dire un régime pseudo périodique.
Si l’amortissement est faible, la pseudo période T des oscillations amorties est pratiquement
égale à la période propre T0 = 2
k
m
du pendule élastique.
3. Cas d’un amortissement fort.
Plus les frottements sont importants, plus les oscillations sont amorties.
Lors que les frottements deviennent suffisamment importants, on observe plus d’oscillations
mais un régime apériodique

4
La « limite » entre le régime pseudo périodique et le régime apériodique correspond au
régime critique (courbe en bleu).
Le régime critique est le régime pour lequel le pendule revient le plus rapidement et se
stabilise à sa position d’équilibre.
III. Etude analytique du mouvement d’un pendule élastique horizontal.
1. Introduction.
On se propose ici de retrouver mathématiquement, en utilisant la 2ème loi de Newton, les
caractéristiques du mouvement du pendule élastique mises en évidence expérimentalement.
2. Expression vectorielle de la force de rappel exercée par un ressort.
2.a. Caractéristiques de la force de rappel.
Lorsque l’on déforme un ressort à spires non jointives (les spires du ressort ne sont pas
« collées » les unes aux autres), le ressort exerce alors à son extrémité une force
F
ayant les
caractéristiques suivantes :
- Point d’application : l’extrémité du ressort.
- Direction : l’axe du ressort.
- Sens : la force
F
a toujours tendance à ramener le ressort dans sa position « non
déformé », encore appelée position naturelle ou position à vide du ressort.

5
Position « à vide »
Position compressée
Position étirée
F
est une force de rappel, elle a toujours tendance à « rappeler » (ramener) le ressort vers sa
position à vide.
- Intensité
Lorsque le ressort est étirée, la norme de
F
a pour expression :
F = k ΔL
où k est la raideur du ressort et ΔL sont allongement ; on peut écrire : ΔL = L – L0, L étant la
longueur du ressort étiré et L0 sa longueur à vide.
On a donc : F = k (L – L0)
Si le ressort est comprimé, on a toujours F = k ΔL , mais ΔL représente la compression du
ressort, soit : ΔL = L0 – L ; on a alors :
F = k (L0 - L)
Finalement que le ressort soit étiré ou compressé, on peut écrire :
F = k
0
LL
2.b. Expression vectorielle de
F
.
On considère un axe Ox parallèle à l’axe du ressort et ayant pour origine la position de
l’extrémité du ressort lorsqu’il est à vide.
●
●
F
●
F
L0
L
L
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%