Dimension d`un espace vectoriel. Rang. Exemples et applications

Dimension d’un espace vectoriel. Rang. Exemples et applications
pr´erequis : les notions de base sur les espaces vectoriels, matrices ´equivalentes, semblables.
Remarques d’ordre g´en´eral : il est clair qu’il faut commencer par un premier paragraphe
sur la th´eorie de la dimension : il faudra veiller `a le r´ediger avec soin afin de respecter un
ordre logique parmi les ´enonc´es. Parmi les passages oblig´es, il faut bien entendu donner des
exemples et des applications sur les applications lin´eaires. Il parait difficile de ne pas ´evoquer
la signature, la multiplicativit´e des degr´es dans les extensions de corps, la g´eom´etrie affine. Il
peut ˆetre int´eressant de se lancer sur les codes correcteurs d’erreurs.
Table des mati`eres
1. Th´eorie de la dimension................................................... 1
1.1. Familles libres, g´en´eratrices et bases. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Th´eor`eme de la base incompl`ete. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3. Sous espace vectoriel, espace quotient, dual. . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.4. Un mot sur la dimension infinie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2. Premiers exemples. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1. Noyaux emboit´es et invariants de similitude. . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2. Formes quadratiques.................................................. 6
2.3. Quelques sous-espaces de matrices. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4. Trigonalisation simultan´ee. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3. Applications.............................................................. 11
3.1. Polynˆomes de Lagrange. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2. Algorithme de Berlekamp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.3. Points de Gauss...................................................... 13
3.4. Codes correcteurs..................................................... 16
3.5. En analyse............................................................ 19
4. D´eveloppements........................................................... 19
5. Questions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6. Solutions.................................................................. 20
R´ef´erences................................................................... 20
1. Th´eorie de la dimension
1.1. Familles libres, g´en´eratrices et bases. —
D´efinition 1.1. — Une famille {(ei)i∈I}de vecteurs d’un espace vectoriel Eest dit libre si
pour tout famille (λi)i∈I∈K(I)`a support fini
X
i∈I
λiei= 0 ⇒ ∀i∈I, λi= 0.
Elle est dite g´en´eratrice si <{ei:i∈I}>=E, i.e. si tout vecteur de Epeut s’´ecrire comme
une combinaison lin´eaire `a support fini des ei.
Remarque : la famille (Xi)i∈N∈K[X] est libre et g´en´eratrice. En revanche elle n’est pas
g´en´eratrice dans K[[X]].
1

2
Remarque : la famille (ei)i∈Iest dite li´ee si elle n’est pas libre, i.e. s’il existe une famille
(λi)i∈I∈K(I)non nulle telle que Pi∈Iλiei= 0.
D´efinition 1.2. — Une famille (ei)i∈Ide vecteurs de Eest une base si elle est libre et
g´en´eratrice.
1.2. Th´eor`eme de la base incompl`ete. —
Th´eor`eme 1.3. — Soient {f1,··· , fp}une famille libre de vecteurs et {g1,··· , gq}une fa-
mille g´en´eratrice de E. Il existe alors un entier n≥pet une base {e1,··· , en}de Etelle que
ei=fipour 1≤i≤pet ej∈ {g1,··· , gq}pour p+ 1 ≤j≤n.
Remarque : ainsi tout espace contenant une famille g´en´eratrice finie admet une base.
Corollaire 1.4. — Soit Eun espace vectoriel muni d’une base de cardinal n. Alors toute
famille de cardinal strictement sup´erieur `a nest li´ee.
Remarque : on en d´eduit alors que le cardinal de toute base de Eest toujours le mˆeme ; on
l’appelle la dimension de E.
Application : en g´eom´etrie affine, une droite (resp. un plan...) est un espace vectoriel de
dimension 1 (resp. 2, ...) ayant perdu son origine.
1.3. Sous espace vectoriel, espace quotient, dual. —
Proposition 1.5. — Tout sous-espace vectoriel Fde Eest de dimension inf´erieure ou ´egale
`a celle de Eavec ´egalit´e si et seulement si F=E.
D´efinition 1.6. — On appelle hyperplan d’un espace vectoriel Ede dimension finie, tout
sous-espace de dimension n−1.
Remarque : en dimension infinie, un hyperplan est un sous-espace tel que E/F est de dimen-
sion 1. La dimension de l’espace quotient E/F s’appelle la codimension de Fdans E.
Remarque : la dimension de E×Fest le produit des dimensions de Eet F.
Remarque : toute famille libre est de cardinal ≤navec ´egalit´e si et seulement si c’est une
base.
Proposition 1.7. — Soient Eun espace vectoriel de dimension finie et Fun sous-espace
de E. Alors Fet E/F sont de dimension finie et dimKE= dimKF+ dimKE/F .
Application : soit u:E−→ Fune application lin´eaire avec F(resp. E) de dimension finie.
Alors Im u(resp. Ker u) est de dimension finie appel´ee le rang de u. Si Eet Fsont de
dimension finie alors rg(u) + dimKKer(u) = dimKE.
Corollaire 1.8. — Les classes d’´equivalences des u:E−→ Fsont param´etr´ees par le rang.
Aspect algorithmique : le rang d’une famille donn´ee se calcule matriciellement en pivotant `a
droite sur la matrice dont les vecteurs colonnes sont ceux de la famille ´ecrits dans une base
fix´ee.
Proposition 1.9. — Soient Fet Gdeux sous-espaces vectoriels d’un espace de dimension
finie E. Alors dimK(F+G) = dimKF+ dimKG−dimK(F∩G).

3
Application : deux droites distinctes du plan projectif s’intersectent toujours en un point.
Remarque : le produit tensoriel de deux espaces de dimension finie est de dimension finie ´egale
au produit des dimensions.
Corollaire 1.10. — Soient k⊂K⊂Eune extension de corps. Les degr´es sont reli´es par
la formule [E:k] = [E:K].[K:k].
Lemme 1.11. — Un espace vectoriel Vsur un corps infini kn’est pas r´eunion finie de sous-
espaces stricts V1,··· , Vt.
Preuve : C’est clair pour t= 1 et on suppose, par hypoth`ese de r´ecurrence, que t≥2 et le
r´esultat ´etabli pour t−1. Ainsi il existe u, v ∈Vtels que u6∈ Vtet v6∈ V1∪ · · · ∪ Vt−1. Si on
avait V=V1∪ · · · ∪ Vtalors v∈Vtet comme l’ensemble des xλ:= u+λv pour λ∈kest
infini, il existe λ6=µtels que xλet xµappartiennent au mˆeme Vj. On ne peut avoir j=tcar
sinon on aurait u∈Vt; donc j < t et Vjcontient xλ−xµ= (λ−µ)vet donc vaussi ce qui
n’est pas.
Application au th´eor`eme de l’´el´ement primitif : il s’agit de montrer que si K/k est une
extension s´eparable de degr´e fini, alors Kadmet un ´el´ement primitif ζsur k, i.e. K=k[ζ].
1) Si kest un corps fini alors K×est cyclique et K=k[ζ] pour tout g´en´erateur ζde K×.
2) Supposons `a pr´esent que kest infini et notons n= [K:k]. Pour Ω une clˆoture alg´ebrique
de K,K/k ´etant s´eparable, il existe des k-isomorphismes K→Ω deux `a deux distincts
τ1,··· , τnde sorte que pour tous i6=j, Ker(τi−τj) est un sous-espace strict de K. D’apr`es
le lemme il existe x∈Kn’appartenant `a aucun des Ker(τi−τj) de sorte que les τi(x) sont
deux `a deux distincts. Comme ce sont des racines dans Ω de µx,k de sorte que
n≤[k[x] : k]≤[K:k] = n
et donc K=k[x].
Pour Ede dimension finie n, son espace dual E∗= homK(E, K) est aussi de dimension n.
Pour (ei)i=1,··· ,n une base de E, on peut d´efinir sa base duale (e∗
i)i=1,··· ,n d´efinie par e∗
j(ei) =
δi,j .
D´efinition 1.12. — Soit Fun sous-espace vectoriel de Ealors F⊥={ψ∈E∗:∀f∈
F, ψ(f) = 0}.
Proposition 1.13. — Si Fest de dimension ralors F⊥est de dimension n−r.
Aspect algorithmique : on ´ecrit la matrice form´ee des vecteurs colonnes, dans une base fix´ee
de E, d’une famille g´en´eratrice de Fauxquels on rajoute le vecteur colonne t(x1,··· , xn). On
pivote alors `a droite jusqu’a faire apparaitre les ´equations lin´eaires.
1.4. Un mot sur la dimension infinie. —
Proposition 1.14. — Soit Eun K-espace vectoriel et V, W1, W2des sous-espaces tels que
V∩W1={0}et V+W2=E. Il existe alors un suppl´ementaire Wde Vcontenu dans W2et
contenant W1.
Preuve : Consid´erons l’ensemble Edes sous-espaces de Econtenant W1et contenus dans W2;
En’est pas vide car W1∈ E. En outre Eest partiellement ordonn´e par la relation d’inclusion
et est inductif. Rappelons que cela signifie que toute chaine totalement ordonn´ee admet un
majorant : ici pour une telle chaine, un majorant est simplement donn´e par la r´eunion qui est
clairement un sous-espace.

4
D’apr`es le lemme de Zorn, Eadmet un ´el´ement maximal, notons le W. Par d´efinition on a
donc W∩V={0}et W1⊂W⊂W2. Il reste alors `a prouver que V+W=E; tout ´el´ement
x∈Es’´ecrit x=v+w2avec v∈Vet w2∈W2. Si w2∈Walors c’est gagn´e, sinon on
consid`ere le sous-espace engendr´e Xpar Wet w2. Par maximalit´e de W,X6 E de sorte qu’il
existe 0 6=y∈X∩V; ainsi y=w+λw2∈Vet donc y∈W∩Vce qui n’est pas.
Remarque : le lecteur notera bien l’utilisation essentielle du lemme de Zorn qui rappelons le
est ´equivalent `a l’axiome du choix. Ainsi notre preuve n’est pas du tout constructive.
Corollaire 1.15. — Tout sous-espace Vde Eadmet un suppl´ementaire.
Corollaire 1.16. — Tout espace vectoriel non nul admet une base.
Preuve : Consid´erons l’ensemble Ades familles libres de E; c’est clairement un ensemble non
vide, partiellement ordonn´e par l’inclusion et inductif. D’apr`es le lemme de Zorn, il poss`ede
un ´el´ement maximal qui est donc une famille libre maximal c’est donc n´ecessairement une
famille g´en´eratrice et donc une base.
Remarque : le lecteur pourra s’exercer sur KNen v´erifiant que toute base est n´ecessairement
non d´enombrable.
Corollaire 1.17. — (Th´eor`eme de la base incompl`ete)
Soit (ei)i∈Iune partie g´en´eratrice de E. Soit J⊂Itel que (ei)i∈Jest libre, il existe alors
J⊂K⊂Itel que (ei)i∈Ksoit une base.
Preuve : On consid`ere l’ensemble Ades familles libres (ei)i∈Apour A⊂I. C’est un ensemble
non vide partiellement ordonn´e par l’inclusion et clairement inductif. D’apr`es le lemme de
Zorn, Aposs`ede une ´el´ement maximal K; comme pr´ec´edement (ei)i∈Kest libre et g´en´eratrice
par maximalit´e de K.
Remarque : citons enfin le cas des espaces de Hilbert, i.e. des espaces hermitiens, au sens du
paragraphe sur l’alg`ebre bilin´eaire, qui sont complets, i.e. toutes les suites de Cauchy sont
convergentes.
D´efinition 1.18. — On dit que (ei)i∈Iest une base de Hilbert d’un espace de Hilbert Hsi
et seulement si :
— c’est une base orthonorm´ee, i.e. < ei, ej>=δi,j ;
— la famille est compl`ete au sens que pour tout x∈Hil existe (λi)i∈Itelle que Pi∈Iλiei=
x, i.e. la s´erie correspondante dans Hest convergente de limite x.
Remarque : le lecteur v´erifiera ais´ement qu’une base au sens de Hilbert n’est pas une base au
sens classique, cf. par exemple les espaces L2.
2. Premiers exemples
2.1. Noyaux emboit´es et invariants de similitude. — Soient Eun K-espace vectoriel
de dimension finie net u∈ L(E). Pour tout λ∈Ket r≥1, on note
Kr(λ) := Ker(u−λId)ret Ir(λ) := Im(u−λId)r,
et on note dKr(λ) := dimKKr(λ) et dIr(λ) := dimKIr(λ). On pose aussi dK0(λ) = 0 et
dI0(λ) = n.

5
Proposition 2.1. — La suite dKr(λ)(resp. dIr(λ)) est tout d’abord strictement croissante
(resp. d´ecroissante) puis stationnaire `a partir d’un indice r0(resp. le mˆeme indice r0). Par
ailleurs la suite
δr(λ) := dKr(λ)−dKr−1(λ)
pour r≥1est d´ecroissante jusqu’au rang r0puis stationnaire ´egale `a 0.
Preuve : La croissance de dKr(λ) (resp. la d´ecroissance de dIr(λ)) est claire puisque
Kr−1(λ)⊂Kr(λ) (resp. Ir(λ)⊂Ir−1(λ)). Par ailleurs si Kr(λ) = Kr+1(λ) alors pour
x∈Kr+2(λ) on a u(x)∈Kr+1(λ) = Kr(λ) et donc ur+1(x) = 0 i.e. x∈Kr+1(λ). Le
th´eor`eme du rang donne enfin que l’indice o`u dIr(λ) stationne est le mˆeme que celui de
dKr(λ). On remarque ensuite que uinduit une injection
Kr+1(λ)/Kr(λ)֒→Kr(λ)/Kr−1(λ)
ce qui implique la d´ecroissance de la suite δr(λ) jusque 0.
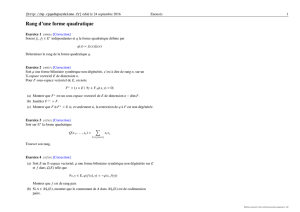
La suite δr(λ) d´efinit une partition du sous-espace caract´eristique Eλ(u) que l’on peut
repr´esenter sous la forme d’un tableau de Young. Ainsi pour λ= 0 et dr:= dKr(0 =, le
tableau de Young associ´e `a uest tel que ses colonnes sont de taille di−di−1; ses lignes
d´efinissent alors une partition (n1≥n2≥ · · · ≥ ns) de n=n1+···+nsqui correspond `a la
forme de Jordan de u.
d1
d2−d1
d3−d2dr−dr−1
n1
n2
n3
ns
e1
e2
e3
e4
e5
e6
0
e7
e8
e9
e10
e11
0
e12
e13
e14
e15
e16
0
e17
e18
0
e19
0
Figure 1. Tableau de Young associ´e `a un endomorphisme
Une fa¸con de construire ce tableau de Young est la suivante : on prend un vecteur e1de
Kr−Kr−1et on note pour i= 1,··· , r −1, ei+1 =ui(e1). Si dim Kr/Kr−1>1 on choisit
un vecteur er+1 ∈Krtel que les images de e1, er+1 dans Nr/Nr−1soient libres et on pose
pour i= 1,··· , r −1, er+1+i=ui(er+1). On continue le proc´ed´e jusqu’a obtenir une base
e1, er+1,··· , ekr+1 de Kr/Kr−1. On choisit alors un vecteur e(k+1)r+1 de Kr−1tel que les
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%