Stabilité des Systèmes : Pôles, Zéros et Critère de Routh
Telechargé par
Abd el malek

1-DÉFINITION
STABILITÉ DE SYSTÈME
Les zéros d'une fonction de transfert sont les racines du numérateur par exemple, lés zéros
de (1+T3p)(1+T4p)/1+αp+βp2+γp3+... sont z1=−1/T3 et z2=−1/T4
AIADI Adil
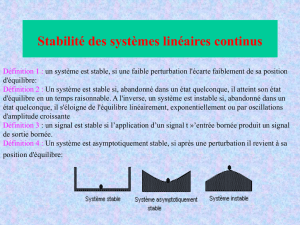
Jusqu'à présent, on a discute de représentation de systèmes et de réponse transitoire. ´ La
prochaine étape est la stabilité. La stabilité est le critère le plus important dans le design
des systèmes de contrôle. Si un système n’est pas stable, les autres param êtres n’ont
aucune signification. On doit donc ` porter une attention particulière a la stabilité. Un
système instable ne peut pas être connu pour donner une réponse transitoire et erreur
statique spécifique.
2-PÔLES ET ZÉROS
Les pôles d'une fonction de transfert sont les racines du dénominateur par exemple les
pôles de 1/(1+T1p)(1+T2p) sont p1=−1/T1 et p2=−1/T2. La partie réelle d'un pôle d'un
système stable est toujours négative
3-CRITÈRE DE ROUTH
Le critère de Routh permet de déterminer le nombre de racines d’un polynôme et donc les
pôles de la FTBO ou de la FTBF ayant leurs parties réelles positives, sans calculer ces
racines ou ces pôles. Critère : soit le polynôme caractéristique (dénominateur) de la FT d’un
procédé ou système asservi ou non .
• Si l’un des coefficients ai est nul, le système est instable.
•Si tous les coefficients ai sont différents de zéro, il suffit qu’ils ne soient pas tous de
même signe pour conclure à l’instabilité.
•Si tous les coefficients ai sont de même signe, l’examen de la première colonne du tableau
de Routh permet de conclure à la stabilité du système.

TABLEAU DE ROUTH
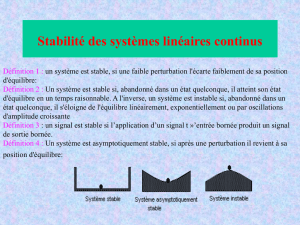
Jusqu'à présent, on a discute de représentation de systèmes et de réponse transitoire. ´ La
prochaine étape est la stabilité. La stabilité est le critère le plus important dans le design
des systèmes de contrôle. Si un système n’est pas stable, les autres param êtres n’ont
aucune signification. On doit donc ` porter une attention particulière a la stabilité. Un
système instable ne peut pas être connu pour donner une réponse transitoire et erreur
statique spécifique.
4-EXEMPLE
Il n’y a pas de changement de signe dans la colonne des pivots, donc il n’y a pas de racine à
partie réelle positive.
AIADI Adil
1
/
2
100%