Stabilité des systèmes linéaires continus

Stabilité des systèmes linéaires continus
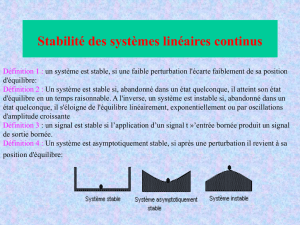
Définition 1 : un système est stable, si une faible perturbation l'écarte faiblement de sa position
d'équilibre:
Définition 2 : Un système est stable si, abandonné dans un état quelconque, il atteint son état
d'équilibre en un temps raisonnable. A l'inverse, un système est instable si, abandonné dans un
état quelconque, il s'éloigne de l'équilibre linéairement, exponentiellement ou par oscillations
d'amplitude croissante
Définition 3 : un signal est stable si l’application d’un signal t »’entrée bornée produit un signal
de sortie bornée.
Définition 4 : Un système est asymptotiquement stable, si après une perturbation il revient à sa
position d'équilibre:

La stabilité la plus intéressante pour l'automaticien est celle
d'un système en boucle fermée.
On considère la structure générale d’un système asservi :
Stabilité des systèmes linéaires continus
L'analyse de stabilité décrite ici s'applique à un système en boucle fermée dont on
connaît la fonction de transfert en boucle ouverte. S'agissant d'un système linéaire,
la fonction de transfert en boucle ouverte peut être écrite sous forme de quotient de
polynômes multiplié par un paramètre Ko variable.
)(
)(
)()()( so
o
oo DsN
KsFsGsG

•FTBF :
Stabilité des systèmes linéaires continus
)( )(
)(1 )(
)( sD sN
sGsG
sG f
f
o
f
Réponse libre d'un système d'ordre n = réponse impulsionnelle
n
ii
i
n
ii
m
iis
fpsc
ps
zsK
sG 1
1
1)(
)(
)(
)(
n
i
tp
ii
ecty 1
)(
TL inverse
Conclusion
Mathématiquement, on définit la stabilité d'un système par la position de ses pôles:
Est stable un système qui n'admet aucun pôle à partie réelle positive.

Pôles Lieu des racines Réponse libre Propriété
tous réels
négatifs stabilité
asymptotique
complexes à
partie réelle
négative
stabilité
asymptotique
un seul
pôle nul stabilité
marginale
une seule
paire
imaginaire
stabilité
marginale
Stabilité en fonction de la position des pôles
du système en boucle fermée

Pôles Lieu des racines Réponse libre Propriété
Au moins un
réel positif instabilité
Au moins une
paire
complexe à
partie réelle
positive
instabilité
pôles nuls
multiples instabilité
paires
imaginaires
multiples instabilité
Stabilité en fonction de la position des pôles
du système en boucle fermée
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%