Mécanique*du*point*
!
1. CINÉMATIQUE*du*point!
"#$%&'(!)*! )!

+,"'-./0!
• 12$$#&3('!4'!050367'!8'!-22(82$$9'0!
-#(390&'$$'0!'3!:24#&('0!2;!-54&$8(&<;'0!
• 12$$#&3('!4='>:('00&2$!8'0!%'-3';(0!:20&.2$?!
%&3'00'!'3!#--949(#.2$!8#$0!4'0!050367'0!8'!
-22(82$$9'0!-#(390&'$$'0!'3!-54&$8(&<;'0!
• 12$$#&3('!4#!89@$&.2$!8'!<;'4<;'0!
72;%'7'$30!:#(.-;4&'(0!
"#$%&'(!)*! A!

B277#&('!
)C D9@$&.2$!
AC E9/9('$.'4!
FC E':6('!
GC H'-3';(!%&3'00'!
IC H'-3';(!#--949(#.2$!
JC K>'7:4'0!8'!72;%'7'$3!
*C E9-#:&3;4#./!
"#$%&'(!)*! F!

B277#&('!
1. Défini<on*
– D9@$&.2$!
– +,"'3!
AC E9/9('$.'4!
FC E':6('!
GC H'-3';(!%&3'00'!
IC H'-3';(!#--949(#.2$!
JC K>'7:4'0!8'!72;%'7'$3!
*C E9-#:&3;4#./!
"#$%&'(!)*! G!

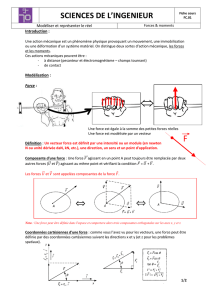
1. DÉFINITION!
• K3;8'!8;!72;%'7'$3!8=;$!:2&$3!0#$0!0'!
:(92--;:'(!8'0!-#;0'0!L4'0!/2(-'0M!<;&!4;&!
82$$'$3!$#&00#$-'C!
• Objet*de*la*cinéma<que*:*
– !D9-(&('!4#!:20&.2$!
– !N#!%&3'00'!
– !N=#--949(#.2$!
8=;$!:2&$3!
#;!-2;(0!8;!3'7:0!
"#$%&'(!)*! I!
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
1
/
54
100%