CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 1 -
Sciences Industrielles pour l’Ingénieur
1- CISAILLE
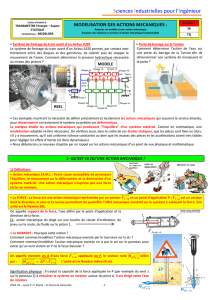
On donne le système de cisaillage ci-dessous : le bras porte-lame (3) exerce son action sur une pièce (2) reposant sur la table (6) en
G. Le levier ADF (5) exerce son action sur le bras porte-lame (3) par l'intermédiaire d’une barre (4). L’action verticale au point F est
de 300 N.
Déterminer, par les 3 moyens du cours, le vecteur
moment de la force
5
au point A.
Rq : aucune mesure ne doit être prise sur ce dessin. Les
éléments nécessaires seront calculés à partir des
données de cette figure.
Correction :
Méthode 1 : ,
5
=AF
5
= 700. cos30°. x
+700. sin30°. y
300. y
=606,218. x
300. y
=181,9. z .
Méthode 2 : ,
5
=AF
.
5
.sin60° selon z (3 doigts de la main droite)
= 0,7 . 300 . 3
2. (z) = 181,9. z .
Méthode 3 (bras de levier) : ,
5
= 0,606218.
5
.z=181,9. z .
2- STABILITE D'UNE GRUE
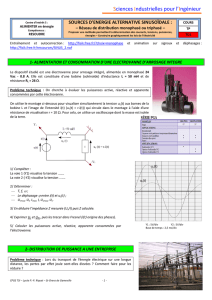
On se propose de déterminer la masse du contrepoids à installer pour assurer la
stabilité de la grue POTAIN MD208A.
La figure 1a représente la grue à vide. En première approche, on utilise la
modélisation de la figure 1b dans laquelle on retrouve :
- la force F
qui est la charge maxi en bout de flèche (Fmaxi = 2.104 N) ;
- la force Q
(lest de contre-flèche). On notera sa norme : Q et son point
d’application : Q ;
- les forces G1
et G2
qui correspondent aux lests de base ;
- la force G3
liée à la masse de la grue (hors lest et charge), rapporté au point G3
(G3 = 2.105 N).
TP
Centre d’Intérêt 8 :
TRANSMETTRE l'énergie –
Aspect STATIQUE
Compétences : MODELISER
MODELISATION DES ACTIONS MECANIQUES (sans frottement)
Modéliser une action mécanique
Entraînement sur cours 1 avec correction
COURS
TD Autonomie
C
G
E
B
30°
280
150
100
30°
A
D
F
500mm
5
4
3
2
1
5
200 mm

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 2 -
Sciences Industrielles pour l’Ingénieur
À partir des dimensions de la figure 1b, et sachant que la masse volumique du béton est de 2222 kg/m3 et la gravité g = 10 m.s-2 :
1/ Déterminer, au point d’application de chaque force, le torseur (forme vectorielle détaillée) associé à chacun des 5 vecteurs force
cités dans l’énoncé.
2/ Déterminer, au point G3, le torseur (forme vectorielle détaillée) associé à chacun des 5 vecteurs force cités dans l’énoncé.
3/ En déduire Q et la masse du contrepoids pour assurer la stabilité de la grue (pas de rotation autour de (G3, )).
(Rq : on n’a pas tenu compte dans ce problème des réactions du sol en A et B, dont les moments en G3 se compensent).
Correction :
Unités des résultats : Résultantes en Newton et Moments en N.m. On note la pesanteur T (terre).
1/ τTCharge =2. 104. y
0
F
τTLestCF =Q. y
0
Q
τTGrue =2. 105. y
0
3
τTLestbase 1=(3.1.1,5).2222.10. y
0
1
=399960. y
0
1
τTLestbase 2 =399960. y
0
2
2/ Le calcul des moments au point G3 s’effectue par la formule du bras de levier :
τTCharge =2. 104. y
0
F
=2. 104. y
3F
2. 104. y
3
=2. 104. y
63.
2. 104. z
3
=2. 104. y
1,26.
106. z
3
τTLestCF =Q. y
0
Q
=Q. y
3Q
Q. y
3
=Q. y
15. Q. z
3
; τTLestbase 1 =399960. y
2 . 399960 . z
3
; τTLestbase 2 =399960. y
2 . 399960 . z
3
3/ En faisant le total des moments en G3 = 0, on trouve Q = 84000 N soit 8400 kg pour le contrepoids nécessaire.
béton

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 3 -
Sciences Industrielles pour l’Ingénieur
3- CABESTAN
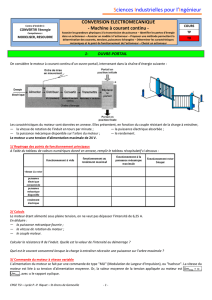
Le schéma ci-dessous représente un cabestan (treuil) : il est constitué de deux manivelles solidaires d’un tambour (t) d’axe (O, z), sur
lequel s’enroule un câble tendu.
- Les mains exercent, aux extrémités des manivelles notées, deux forces 1
et 2
parallèles et de même intensité 100 N.
- Le câble exerce, en A, sur le tambour, une force
verticale.
- L’ensemble des autres forces s’exerçant sur le treuil est équivalent à une force
exercée en O.
1/ Déterminer le vecteur moment au point O de chacun des 2 vecteurs forces 1
et 2
.
2/ Déterminer le torseur statique de l’A.M. exercée par la main 1 sur la manivelle. Vous l’exprimerez en son point d’application (noté
F1) puis au point O sous une forme vectorielle détaillée.
3/ Sachant que la somme vectorielle des moments des 4 actions mécaniques au point O est nulle, déterminer
(on donne OA =
6,5 cm).
Correction :
1/ Bras de levier :
O,
1
=
O,
2
=
30. z
en N.m
2/ τmain 1manivelle =Rmain 1manivelle
=
1
=100. x
M
1
,
main 1manivelle
= M
1
,
1
= 0
1
=
1
=100. x
M
,
1
=30. z
O
en N et N.m
3/ Après calcul, on trouve Fct
=923. y
en N
4- VEHICULE RENVERSE
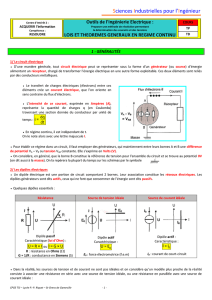
Dans le cadre de la préparation au rallye Paris/Dakar, on cherche à déterminer
l'effort nécessaire à deux pilotes pour relever un véhicule de 1 500 kg renversé.
On décide d’adopter les 2 modèles suivants (distances en mètres) :
y
x
z
On cherche la force disponible
au niveau de la corde, c'est-à-
dire la norme de
.
F2
d = 30 cm
Main 1
F1

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 4 -
Sciences Industrielles pour l’Ingénieur
Modèle 1 : Modèle 2 :
Données et notation :
2
1
=.+.
Coordonnées des points : A(0, 0, 0) B(0.3, 2, 0) G(0.8, 1, 0) en mètres.
Les actions mécaniques aux points A, B et G sont des glisseurs.
Gravité : g = 10 m.s-2
Pour cette étude, on se place à la limite de relevage, c'est-à-dire que la force exercée par les 2 pilotes est tout juste suffisante pour
commencer à faire basculer le véhicule, qui n’est donc en contact avec le sol qu’au point A.
1/ Pour le modèle 1, exprimer les 2 torseurs (réduits au point A sous forme vectorielle détaillée) associés aux 2 actions mécaniques
globales qui s’exercent aux points :
- B : point d’attache de la corde et représentant l’action des pilotes sur la corde. Ce torseur sera seulement fonction de XB,
- G : centre de gravité du véhicule de masse M = 1 500 kg.
2/ Pour le modèle 1, sachant que ,2
1
+ ,
1
= 0
, déterminer 2
1
.
3/ Pour le modèle 2, exprimer le torseur (réduit au point A sous forme vectorielle détaillée) associé à l’action mécanique due à la
gravité, définie par la pression linéique :
=+. où a et b sont des constantes.
4/ Sachant que les 2 torseurs modélisant l’action mécanique due à la gravité sur les modèles 1 et 2 sont statiquement identiques,
déterminer les constantes a et b.
Correction :
1/ τ2
1 =.+ 0,7. .
0,21.2. .
=.+ 0,7. .
1,79..
unités à préciser
τ
1 =..
..
=15000.
12000.
(Terre = pesanteur)
2/ XB = -6704 N et YB = -4693 N, donc 2
1
= 8183 .
3/ τ
1 =
1
=
2,3
0,3 = .
2,3
0,3 .
,
1
=
2,3
0,3 = (+. ) (. + ). .
2,3
0,3
= (2,6 . + 2 . ).
(2,6 . + 4,05 . ) .
4/ 15000 = 2,6 . a + 2 . b et 12000 = 2,6 . b + 4,05 . a conduisent après résolution à b = 22052,2 N/m et a = -11194 N/m.
Le poids du véhicule est modélisé globalement par un
glisseur au centre de gravité : G.
Le poids du véhicule est modélisé par une répartition
de forces locales.
y
x
2
1
2
1
1
Sol 0
2
35°
35°
2
Sol 0
1
2
0,3

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 5 -
Sciences Industrielles pour l’Ingénieur
5- MECANISME ELEVATEUR (d'après sujet concours)
1/ Déterminer le moment du vecteur force au point 04.
2/ Exprimer { effort F
5} au point Q.
3/ Déterminer (forme vectorielle détaillée) le torseur statique associé aux actions mécaniques transmissibles par chacune des 3
liaisons.
Correction :
1/
04,
=
04
=
.5
+.5
+.5
.5
=..5
..5
2/
,
=
04,
+
04
et
04
=
.2
=..2
donc
5 = .5
..5
..5
+..5
(car
y2
= y5
)
3/ Liaison pivot entre 4 et 2 : 4
2 = 42 .2
+42 .2
+42 .2
442 .2
+442.2
4
(on peut aussi l'exprimer dans B4)
Entre 5 et 2 : liaison pivot glissant ; entre 5 et 4 : liaison hélicoïdale … voir cours pour les torseurs.
a
c
-d
1
/
5
100%