Sciences Industrielles pour l`Ingénieur

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 1 -
Chaîne d'énergie S23 Convertir l'énergie S231 Actionneurs et préactionneurs associés incluant leur cde
Protocoles expérimentaux et réalisation S6 Protocoles expérimentaux
OBJECTIF DE LA SEANCE
Compétences attendues
Au terme de la séance, vous devez savoir :
— A3 (ANALYSER) : Appréhender les analyses fonctionnelle et structurelle
pour identifier les fonctions de la chaîne d'énergie, les constituants la
réalisant et les caractéristiques des flux d'énergie échangés ; A5 : Apprécier
la pertinence et la validité des résultats de mesure.
— B1 (MODELISER) : Identifier et caractériser les grandeurs physiques
agissant sur un système pour associer les grandeurs physiques aux
échanges d'énergie et à la transmission de puissance ; identifier les pertes
d'énergie dans un convertisseur statique, dans un actionneur ou une liaison.
— C1 & C2 (RESOUDRE) : Choisir et mettre en œuvre une démarche de résolution pour la détermination du point de
fonctionnement de l'actionneur et des puissances échangées.
— D2 & D3 (EXPERIMENTER) : Proposer, justifier et mettre en œuvre un protocole expérimental pour choisir les
configurations matérielles du système en fonction de l'objectif visé, justifier le choix de la grandeur à mesurer, choisir et
mettre en œuvre les appareillages, mesurer les grandeurs potentielles / de flux et repérer leur sens de transfert.
Problèmes techniques
Si l’écart entre la consigne de cap et le cap réel dépasse un certain seuil, le moteur du pilote est mis en marche dans un sens ou dans
l’autre. Il entraîne une vis et une tige de vérin, qui modifie la position du safran et donc du bateau. Le moteur est alimenté par une
tension constante 12 V, mais doit vaincre une force résistante (due à l’eau) variable selon l’angle du safran par rapport à l’axe du
bateau. La batterie possédant une capacité limitée, il est fondamental que les conversions énergétiques successives se fassent avec
le meilleur rendement.
On cherche donc à évaluer le rendement de chaque conversion et le rendement global, selon la charge résistante de l'eau. Ceci
permettra notamment d'établir : 1/ s'il vaut mieux corriger immédiatement et souvent de faibles écarts de cap, ou s'il vaut mieux
attendre un écart plus important ; 2/ quelle conversion d'énergie est le "maillon faible" de la chaîne.
On évaluera ensuite la correction du cap lorsque la batterie se décharge vers 9 à 10 V.
Démarche, en gardant toujours à l'esprit que vous devrez présenter vos résultats au
reste de la classe :
Sciences Industrielles pour l’Ingénieur
TP série 5
Centre d’Intérêt 6 :
CONVERTIR et
TRANSMETTRE l'énergie
PILOTE ELECTRIQUE TP32 :
- Quel est le maillon faible de la chaîne d'énergie ?
- La correction du cap reste-t-elle assurée sous faible alimentation ?
COURS
TD
En cas de retard au cours de la séance, vous devrez
vous répartir sur ces 2 tâches et adopter une
démarche collaborative.
I/ Identification
matérielle et analyse
fonctionnelle
Durée : 0 min (préparé) 1h 45 min
II/ Performances énergétiques
du MCC et du pilote entier –
Conclusion sur la correction
III/ Commande du moteur par
pont en H et modélisation pour
prévoir l'influence de la décharge
batterie - Conclusion
Démarche ingénieur dans ce TP : évaluer / réduire l'écart 1 puis 3

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 2 -
?...
?... ?... ?...
Composantes de la puissance :
P = ?... Pa = ?... Pm = ?... Ps = ?...
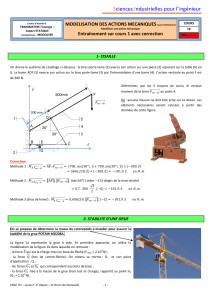
I/ IDENTIFICATION MATERIELLE ET ANALYSE FONCTIONNELLE
1/ Présentation
Le pilote automatique de bateau détermine l’orientation du safran
(gouvernail) en fonction d’un cap de consigne, lorsque le barreur est occupé à
d’autres tâches (réglage des voiles, repos, …).
Le système agit pour cela sur la barre, solidaire du safran.
2/ Architecture en réseau et chaîne d'information du pilote
- Le réseau SimNet permet l’interconnexion facile et l’échange de données
entre les instruments, les appareils de navigation et le pilote automatique.
Le pilote peut recevoir les informations d'un GPS, les données d’angle du vent
en provenance du capteur girouette anémomètre, les données de vitesse du
bateau ("speedomètre") et les données de cap du capteur compas. Ces
dernières peuvent être affichées sur un afficheur.
- Le clavier à 5 touches du pilote permet d’effectuer des réglages de cap
précis et d’utiliser toutes les fonctions de navigation ;
- en l'absence du capteur compas, un compas interne (Fluxgate) fournit
l'information du cap suivi ;
- un codeur incrémental à aimants + capteurs Hall fournit l'information de
position et vitesse de la tige ;
- le microcontrôleur prend en compte les consignes et les informations et
délivre les ordres de sortie ou rentrée de tige.
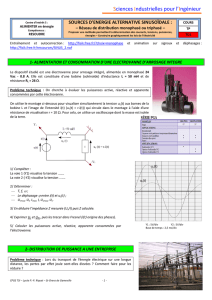
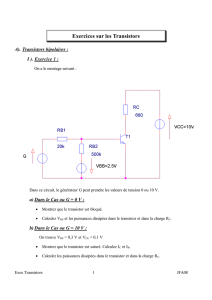
3/ La chaîne d'énergie
L'énergie change de
nature le long de
cette chaîne.
Caractériser cette
énergie aux points
indiqués :
Placer et nommer les
composantes de la
puissance présente après
chaque conversion (en
entrée : tension U(V) et
courant I(A)
P = U.I
(W)).
Préciser les unités.
Un des rendements peut être estimé égal à 90% et dépend
peu de la charge résistante de l'eau ; il ne sera donc pas
mesuré. Lequel ?
Montage bâbord ou tribord
Fonctions Convertir et Transmettre :

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 3 -
II/ PERFORMANCES ENERGETIQUES DU MOTEUR A COURANT CONTINU ET DU PILOTE ENTIER,
SOUS CHARGE RESISTANTE VARIABLE
Les forces développées par l’eau sur le gouvernail dépendent de nombreux facteurs tels que la vitesse du bateau, l’angle du safran,
etc. Elles imposent des contraintes de couple et d’intensité absorbée par le moteur électrique lors d’un mouvement de barre.
L’étude proposée ici porte donc sur le comportement d’un MCC à aimants permanents de faible puissance, dans diverses
situations de charge. La tension d’alimentation est constante (12 V). L'objectif est de comprendre ce qu’il se passe lorsque les
forces exercées par l’eau sur le gouvernail varient.
Pour cela, vous allez devoir mesurer :
— les grandeurs électriques en entrée du moteur (courant Im, tension Um) ;
— la vitesse angulaire m en sortie du moteur ;
— les grandeurs mécaniques (vitesse de translation V) en sortie du pilote.
Les mesures seront effectuées sur le banc d’essai du pilote, en faisant varier une charge résistante à soulever, représentant les
forces développées par l’eau.
Mettre le banc d'essai sous tension (alimenter l'ensemble en 12 V) puis vérifier, à vide, que les commandes manuelles et
sont opérationnelles.
1/ Moyens de mesures
Vous avez accès aux points de mesure suivants :
Courant Im dans le moteur Tension Um aux bornes du moteur
Le couple utile sur l'arbre moteur Cm sera quant à lui estimé à partir du courant Im et de la constante de couple Kc du MCC.
On rappelle que Cm = Kc. (Im-I0).
A partir de la documentation du moteur en Annexe, relever le courant à vide I0 puis en déduire Kc en N.m/A.
Pour la suite, le moteur étant seulement alimenté sous 12 V au lieu de 18, on négligera I0.
2/ Expérimentation
Mettre en place les instruments adéquats. Attention, il faut refaire le zéro de la pince avant chaque mesure.
En modifiant les masses soulevées par le pilote, relever Um, Im,
m et V dans le tableau suivant (cases grisées seulement) :
Rq : Le plateau seul a une masse de 2,5 kg. Les mesures seront seulement réalisées lorsque la tige du pilote rentre. Il faudra vous
organiser entre vous pour éviter de multiplier les essais inutilement (les transistors chauffent).
Masse soulevée (kg)
2,5
22,5
32,5
42,5
Tension moteur Um (V)
Courant absorbé Im (A)
Puissance électrique absorbée Pa (W)
Pertes par effet Joule dans le moteur Pj = R . Im2(W)
Couple sur l'arbre moteur Cm (N.m)
Vitesse angulaire du moteur
m (Attention : rad/s)
Puissance mécanique en sortie du moteur Pm (W)
R = 0,75
Vitesse Nm (tr/min) du moteur (une
bande réfléchissante est collée sur la
poulie motrice ; un orifice permet
de la "viser")
Période du codeur et calcul de la vitesse V de
translation de la tige : la période T des signaux
HE1 ou HE2 correspond à 1 pas (p = 3 mm) de
la vis d’entraînement. Voir document ressource
pour le principe de mesure.

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 4 -
Rendement du moteur seul
Force exercée par la tige F (N)
Vitesse de translation de la tige V (m/s)
Puissance mécanique en sortie du pilote Ps (W)
Rendement de l'ensemble réducteur + vis/écrou
Rendement global du pilote (moteur + ens. cinématique)
Compléter le tableau en calculant les grandeurs manquantes.
3/ Exploitation des résultats précédents et conclusion
Quelles sont les conséquences d’une augmentation de la poussée de l’eau sur le gouvernail pour :
— l’intensité absorbée par le moteur ?
— la vitesse de rotation (qualifier la variation : beaucoup, légèrement …) ?
— le couple disponible sur l’arbre moteur et la force exercée par la tige du vérin en sortie ?
Commenter le rendement respectif du moteur vis à vis de celui de l'ensemble pompe + vérin. Quel est le maillon faible de la chaîne
d'énergie ?
En examinant la charge où les rendements sont les meilleurs, conclure sur la stratégie de correction à mettre en place : vaut-il
mieux corriger immédiatement et souvent de faibles écarts de cap, ou faut-il attendre un écart plus important ?
III/ COMMANDE DU MOTEUR PAR PONT EN H ET
MODELISATION POUR PREVOIR L'INFLUENCE DE LA DECHARGE DE LA BATTERIE
L'objectif de cette partie est de valider un modèle de commande pour le moteur, ainsi que le modèle du moteur lui-même. Une
fois ce modèle rendu conforme aux données du constructeur, on pourra évaluer le bon fonctionnement ou non de l'ensemble
pour une batterie déchargée à 9 V.
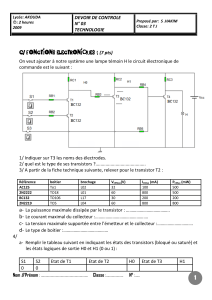
1/ Commande du moteur par pont en H
Le moteur du pilote doit-il être capable de tourner dans un seul sens ou dans les 2 ? Sur quelle grandeur doit-on agir pour inverser le
sens de rotation d'un moteur à courant continu ?
Ouvrir le fichier PROTEUS
"Tp_Pilote_élec.DSN".
Sauver sous "Votre_
Nom.DSN".
Ce schéma reprend à peu
de choses près le schéma
donné par le constructeur :
Lancer la simulation et
constater l'effet des
signaux logiques 0/5V O1 et
O2.
L'inversion de la tension
d'alimentation est assurée
par 2 transistors MOSFETS
canal N et 2 canal P se comportant en interrupteurs (voir Annexe).
Pour voir le sens de circulation du courant à travers le moteur, placer :
— un ampèremètre ;
O1 Signaux logiques de commande issus de la fonction "Traiter l'information" O2
MODELE ELECTRONIQUE

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 5 -
— des voltmètres aux bornes des transistors, permettant de déterminer leur état saturé / bloqué.
Les instruments virtuels se trouvent en cliquant sur .
Compléter le tableau ci-dessous, et tracer à la page précédente le trajet du courant moteur Im :
Etat (sat/bloqué) des
transistors
TR10
TR11
TR12
TR13
Tension Um aux bornes
du moteur
Trajet et sens
du courant Im
O1 = "1", O2 = "0"
En rouge
O1 = "0", O2 = "1"
En bleu
O1 = "0", O2 = "0"
??
2/ Modèle du moteur en régime permanent, aux points de fonctionnement nominal et réel
L'édition des paramètres du moteur fait apparaître des valeurs par défaut ("coil" = bobine) :
La vitesse à vide doit être multipliée par 10 (100 RPM = 1000 trs/min) ;
Le rapport Load/Max Torque permet de simuler une charge du moteur entre 1% (moteur à
vide) et 100% (moteur bloqué).
La documentation du constructeur en Annexe donne des valeurs qui ne sont valables que pour une tension Um nominale = Umn =
18 V. Modifier le modèle et le schéma en conséquence.
Avec la documentation, trouver la valeur de R, puis la saisir dans le modèle Proteus.
En mettant la vitesse à vide à 1000 (doc. : 10000 trs/min), on s'aperçoit que le courant n'est pas égal à 0,85A : le modèle Proteus
doit être paramétré.
Pour paramétrer le modèle, charger légèrement le moteur (Load/Max Torque) et augmenter la vitesse à vide pour avoir des valeurs
conformes à celles du constructeur (Attention, l'affichage "MAX" signale une vitesse au-delà de 10000 trs/min).
Pour placer le moteur au point de fonctionnement nominal (rendement max.), il faut maintenant modifier sa charge pour obtenir le
courant nominal Imn.
Charger le moteur pour avoir Imn ; la vitesse est-elle alors conforme aux valeurs du constructeur ? Si oui, votre modèle est validé !
Modifier l'alimentation du moteur sur le schéma pour trouver le point de fonctionnement réel du pilote. A quelle vitesse tourne-t-il ?
Est-ce cohérent avec les mesures faites dans la 1ère partie ?
3/ Modification de la tension de la batterie et conséquence sur le fonctionnement du pilote
On suppose une décharge assez importante de la batterie jusqu'à 9V. Modifier les alimentations du schéma en conséquence.
Tester le fonctionnement. Quel est l'impact sur la correction du cap par le pilote automatique ?
ANNEXE : CARACTERISTIQUES DU MOTEUR RS-755VC-4540
ANNEXE : TRANSISTORS MOSFETs EN COMMUTATION
Ce type de transistor fonctionne comme un interrupteur quasi parfait qui possède :
• une résistance infinie lorsqu'il est bloqué (interrupteur ouvert). • une résistance quasi nulle (RDSon) lorsqu'il est saturé (interrupteur fermé).
La tension VGS permet le passage de l'état bloqué (interrupteur ouvert) à l'état saturé (interrupteur fermé).
Il existe deux types de transistors MOS : NMOS et PMOS :
Transistor NMOS Transistor PMOS
VGS >> VGSth transistor saturé
VGS < VGSth transistor bloqué
VGS << VGSth transistor saturé
VGS > VGSth transistor bloqué
1
/
5
100%