TD MCC

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 1 -
Sciences Industrielles pour l’Ingénieur
1- OUVRE-PORTAIL
On considère le moteur à courant continu d’un ouvre-portail, intervenant dans la chaîne d’énergie suivante :
Les caractéristiques du moteur sont données en annexe. Elles présentent, en fonction du couple résistant de la charge à entraîner,
— la vitesse de rotation de l’induit en tours par minute ; — la puissance électrique absorbée ;
— la puissance mécanique disponible sur l’arbre du moteur ; — le rendement.
Le moteur a une tension d’alimentation maximale de 24 V.
1/ Repérage des points de fonctionnement principaux
A l’aide du tableau de valeurs numériques donné en annexe, remplir le tableau récapitulatif ci-dessous :
2/ Calculs
Le moteur étant alimenté sous pleine tension, on ne veut pas dépasser l’intensité de 6,25 A.
En déduire :
— la puissance mécanique fournie ;
— la vitesse de rotation du moteur ;
— le couple moteur.
Calculer la résistance R de l'induit. Quelle est la valeur de l’intensité au démarrage ?
Quel est le courant consommé lorsque la charge à entraîner nécessite une puissance sur l’arbre maximale ?
3/ Commande du moteur à vitesse variable
L’alimentation du moteur se fait par une commande de type "MLI" (Modulation de Largeur d’Impulsion), ou "hacheur". La vitesse du
moteur est liée à sa tension d’alimentation moyenne. Or, la valeur moyenne de la tension appliquée au moteur est Ummoy = .
Ummax , avec le rapport cyclique.
TP
CONVERSION ELECTROMECANIQUE
- Machine à courant continu -
Associer les grandeurs physiques à la transmission de puissance – Identifier les pertes d'énergie
dans un actionneur – Associer un modèle à l'actionneur – Proposer une méthode permettant la
détermination des courants, tensions, puissances échangées – Déterminer les caractéristiques
mécaniques et le point de fonctionnement de l'actionneur – Choisir un actionneur
COURS
TD
Centre d’Intérêt 6 :
CONVERTIR l'énergie
Compétences :
MODELISER, RESOUDRE

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 2 -
Sciences Industrielles pour l’Ingénieur
Calculer la valeur du rapport cyclique de la tension à appliquer au moteur si l’on désire une tension moyenne de 16 V à ses bornes.
Calculer la vitesse du moteur si la tension moyenne appliquée à ses bornes est 16 V, en supposant le courant sensiblement constant
et égal au courant nominal.
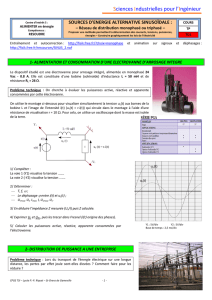
4/ Analyse des relevés du courant
L’oscillogramme ci-contre représente l’évolution du courant électrique
absorbé par le moteur lors du déplacement complet du portail.
Ce relevé a été réalisé dans les conditions nominales de fonctionnement avec
une tension d’alimentation de 24 V.
Identifier avec des flèches sur le graphique les zones :
— de démarrage du moteur ;
— de rotation ;
— de blocage (moteur alimenté);
— d’arrêt (moteur non alimenté).
5/ Transmission de l'énergie
Le motoréducteur actionne une vis, qui provoque la translation d’un
écrou. Ce dernier est articulé au vantail par l’intermédiaire d’une
équerre rigide provoquant le pivotement de ce vantail.
Afin d’obtenir un déplacement lent en fin de course, on désire que la
vitesse de l’écrou soit conforme à l’allure donnée ci-contre :
Déterminer la vitesse de rotation du moteur en tr/min lors des phases de
fonctionnement II et IV.
On donne :
Caractéristiques
Données / Observations
Réducteur
Rapport de transmission : vis / moteur = 0,122
Rendement : ηr = 0,93
Vis-écrou
Pas de la vis : p = 4 mm ;
Rendement : ηv = 0,4
La norme impose pour des raisons de sécurité, que l’effort sur le vantail ne doit pas excéder 150 N dans la zone de pincement entre
les vantaux. Cela correspond à un effort axial sur l’écrou de Fe = 1800 N.
Calculer le courant absorbé par le moteur lorsque l’effort sur le vantail atteint 150 N.
2- SCOOTER ELECTRIQUE
Batteries
L’énergie d’un scooter électrique est stockée dans 3 batteries, associées en série.
Chaque batterie a une tension nominale de 6 V et une capacité nominale de 100
A.h.
1/ Calculer la tension nominale de l’association des 3 batteries du scooter. Quelle
est la capacité nominale de cette association ?
Essais moteur
Compte-tenu de l’importance du rendement du moteur sur l’autonomie du scooter, le constructeur a effectué les 2 essais suivants,
correspondant aux 2 points de fonctionnement extrêmes du moteur :
1er essai : Courant moyen consommé par le moteur : Imoy = 45 A
Tension moyenne aux bornes de l’induit : Umoy = 17,85 V
Vitesse de rotation maximale : 4680 tr/min
2/ En vous servant de la courbe ci-après, calculer le couple
utile sur l’arbre moteur et le rendement du moteur pour
ce point de fonctionnement.

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 3 -
Sciences Industrielles pour l’Ingénieur
2ème essai : Puissance fournie : maximale
Courant moyen consommé par le moteur : Imoy = 400 A
3/ Déterminer le couple moteur, ainsi que la tension moyenne
appliquée aux bornes de l’induit sachant que le moteur travaille
avec un rendement de 45%.
Augmentation de l'autonomie par récupération d'énergie
Une solution consiste à employer la technique de récupération
d’énergie. Cette solution est prévue par le constructeur. Pour
les calculs suivants, on considérera que :
— la force électromotrice s’exprime par E = 0,214 . N, où N
représente la vitesse de rotation du moteur en tr.s–1 ;
— la batterie est chargée à sa tension nominale ;
— le rapport de transmission r est donné par r = Ns / Ne = 0,14 ; — le rayon de la roue vaut 0,2 m.
4/ Expliquer le terme "récupération d’énergie", en précisant notamment dans quelle phase de fonctionnement du scooter ce
phénomène est possible, ainsi que la conversion d’énergie alors réalisée.
Indiquer le quadrant de fonctionnement dans le plan Couple(Vitesse).
5/ Quelle est la condition sur E pour que le moteur puisse recharger la batterie ? Calculer la vitesse minimale de rotation du moteur
(en tr.min–1) pour avoir ce mode de fonctionnement.
6/ Déterminer la vitesse minimale du scooter correspondante (en km.h–1). Que peut-on dire de l’efficacité de la récupération
d’énergie, notamment en ville ?
3- FAUTEUIL ROULANT ELECTRIQUE POSITELEC 90
Cette étude consiste à valider le choix des moto-réducteurs d’un fauteuil électrique et à
vérifier que la batterie répond à l’autonomie préconisée dans le cahier des charges
fonctionnel.
Validation du choix du moteur
L’étude mécanique a permis de calculer l’effort nécessaire pour vaincre la résistance au roulement : Troul = 15 N. On note V la
vitesse d’avance du fauteuil. La roue motrice a un diamètre de 360 mm.
1/ Calculer la puissance P nécessaire à l’avancement du fauteuil à V= 6 km/h.
2/ Calculer la vitesse de rotation de la roue
s (en rad/s) et déduire le
couple Cs nécessaire à l’avancement pour une vitesse de 6 km/h.
La chaîne d’énergie est la suivante :

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 4 -
Sciences Industrielles pour l’Ingénieur
3/ Déterminer le couple Cm nécessaire au niveau de l’actionneur, en fonction du rapport de réduction r, du couple Cs exercé par le
réducteur sur la roue, et du rendement global
g
de la transmission.
4/ Pour un couple utile de 0,07 N.m, en déduire à partir des courbes caractéristiques du moteur (ci-dessous) la puissance utile
nécessaire, la vitesse de rotation et le rendement.
Calculer dans ce cas la puissance absorbée Pa puis le courant Ia traversant le moteur, alimenté en 24 V.
5/ Le couple utile demandé au moteur est en réalité entre 50.10-3 N.m et 100.10-3 N.m.
Justifier la validité du choix du moteur effectué par le concepteur.
Vérification de l’autonomie du fauteuil
La capacité de la batterie indiquée par le constructeur est de 15 A.h sous 24 V.
6/ Pour ce fauteuil essentiellement destiné à un usage extérieur, l’autonomie désirée est de 20 km à 6 km/h sur sol horizontal.
Chaque moteur devant alors fournir une puissance de 36 W soit 72 W pour le fauteuil, quelle doit être l’énergie embarquée à bord du
véhicule ?
7/ La batterie utilisée (accumulateur Cadmium-Nickel) ayant une énergie massique de 216000 J/kg, quelle doit être sa masse ?
8/ Conclure sur le choix du constructeur quant à la batterie, en termes de masse et d’autonomie (la masse du fauteuil est de 100 Kg,
et les calculs ont été réalisés en considérant la masse de la personne transportée égale aussi à 100 Kg).
9/ Les essais électriques font apparaître que la puissance électrique moyenne consommée est en réalité de 100 W.
Calculer l’autonomie du fauteuil dans les conditions expérimentales décrites ci-dessus.
10/ Calculer le courant de démarrage, ainsi que la résistance de l'induit R.
11/ Calculer le rapport cyclique du hacheur pilotant le MCC pour être à mi-vitesse, c'est-à-dire 3 Km/h (on suppose que la charge ne
change pas).
Moteur à courant continu
Johnson LH5832LG

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 5 -
Sciences Industrielles pour l’Ingénieur
4- ETUDE D'UNE UNITE DE STOCKAGE POUR MAGASIN AUTOMATISE
L'étude porte sur l'actionneur de l'axe vertical (axe Z) d'un robot de stockage automatisé de faible puissance. Le motoréducteur est
fixé au socle de cet axe. Deux poulies de diamètre 8 cm associées à une courroie crantée permettent le déplacement de la charge
sur l'axe vertical.
Caractéristiques nominales du moteur :
C'est un moteur à courant continu à aimants permanents.
tension nominale d’induit : Un = 62 V
courant nominal d’induit : In = 6 A
vitesse nominale : Nn = 3000 tr/min
constante de fcém : k = 0,191 V.s/rad
Hypothèses de travail :
Le modèle du moteur utilisé est de type R, E.
Les frottements et le couple de pertes sont négligés. Le réducteur est parfait.
Caractéristiques de la charge ramenée sur l'arbre moteur :
couple résistant : Cr = 1 Nm
moment d'inertie : J = 3,04.10-4 kg.m²
On note C le couple moteur sur l'arbre du moteur et la vitesse de rotation du moteur en rad/s.
On définit r = red/ = 1/20 le rapport de réduction où red est la vitesse de rotation en rad/s en sortie du motoréducteur.
Prédéterminations
1/ A partir des caractéristiques électriques nominales du moteur, déterminer la valeur de la résistance R de l'induit.
2/ A vitesse nominale constante et compte tenu de la charge transportée, calculer :
— la vitesse de déplacement linéaire vc de la charge ;
— le courant I absorbé par le moteur.
Etude des différentes phases de fonctionnement en régime dynamique
Dans cette partie, on s'intéresse à l'évolution de la tension, du courant et de la puissance suivant les différentes phases de
fonctionnement. On néglige désormais la résistance R de l'induit. Afin d'éviter les secousses, les variations de vitesse sont telles
que sur la figure 1 du document réponse.
3/ Rappeler en régime dynamique la relation entre les grandeurs mécaniques J,
, Cr et C.
Déterminer l'expression du courant I à partir de l'expression précédente.
Quelle est l'expression de la tension U aux bornes du moteur ?
4/ Compléter sur le document-réponse les graphes de I, U et P la puissance électrique absorbée par le moteur en précisant les valeurs
remarquables aux différents instants. On pourra commencer par remplir le tableau de valeurs ci-dessous.
5/ Tracer dans le plan courant - tension le trajet du point de fonctionnement (I, U) pour obtenir le profil de vitesse désiré. En déduire
la propriété que doit avoir le convertisseur associé au moteur.
dΩ
dt
en rad/s²
I en A
U en V
P = U.I en W
t є [0;t1]
t є [t1;t2]
t є [t2;t3]
t є [t3;t4]
t є [t4;t5]
t є [t5;t6]
 6
7
8
9
6
7
8
9
1
/
9
100%