Cours
MPSI 2
33 Mouvements à forces centrales
Table des matières
1 Forces centrales 2
1.1 Définition ........................................... 2
1.2 Travail et énergie potentielle ................................ 2
1.3 Forces centrales newtoniennes ............................... 2
2 Conservation du moment cinétique et conséquences 3
2.1 Théorème du moment cinétique .............................. 3
2.2 Conservation du moment cinétique et conséquences .................. 4
2.2.1 Mouvement plan .................................. 4
2.2.2 Constante des aires ................................. 4
2.2.3 Interprétation géométrique ............................ 4
3 Forces centrales newtoniennes : étude énergétique 5
3.1 Energie potentielle effective ................................ 5
3.2 Trajectoires .......................................... 6
3.2.1 Force attractive (K > 0) ............................... 6
3.2.2 Force répulsive (K < 0) ............................... 7
4 Force centrales newtoniennes : trajectoires circulaire et elliptique 8
4.1 Trajectoire circulaire .................................... 8
4.1.1 Force newtonienne quelconque .......................... 8
4.1.2 Force gravitationnelle ................................ 9
4.2 Généralisation à la trajectoire elliptique ......................... 9
5 Applications 9
5.1 Satellites géostationnaires ................................. 9
5.2 Vitesses cosmiques ..................................... 11
Nous avons déjà introduit précédemment les lois de Newton ainsi que les théorèmes de l’éner-
gie cinétique et de l’énergie mécanique sans restriction quant à leur application. Dans ce cha-
pitre, nous allons nous intéresser en particulier à l’action d’un type de force : les forces centrales.
Ces forces regroupent notamment les forces de gravitation et électrostatique, dites forces new-
toniennes. L’étude détaillée de leur action permet donc non seulement de comprendre le mou-
vement des astres à l’échelle astronomique, amis aussi celui des particules chargées à l’échelle
microscopique.
1

1 Forces centrales
1.1 Définition
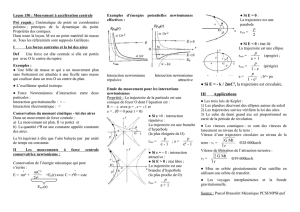
On considère un point matériel M soumis à une force
#«
F exercée par un objet situé en O. La force
est dite centrale si elle peut se mettre sous la forme :
#«
F = Fr
#«
eravec #«
er=
# «
OM
k
# «
OMk
O
•M
•
#«
er
#«
F
• si Fr> 0, la force est répulsive ;
• si Fr< 0, la force est attractive.
Exemple : interaction entre un proton et un électron, interaction entre la terre et un satellite,
interaction entre le Soleil et la Terre...
1.2 Travail et énergie potentielle
Le travail élémentaire est :
δW =
#«
F .d#«
r = Fr
#«
er.d(r #«
er)=Fr
#«
er.(dr #«
er+ rd#«
er)=Frdr + Frr#«
er.d#«
er
Mais #«
erest un vecteur unitaire donc :
k#«
erk2=1=#«
er.#«
er
et donc :
dk#«
erk2= 2 #«
er.d#«
er= 0
On obtient donc :
δW=Frdr
Si on peut trouver une énergie potentielle Eptelle que :
δW = –dEp
alors la force est dite conservative et :
Fr= –dEp
dr
1.3 Forces centrales newtoniennes
Une force centrale est dite newtonienne si elle peut s’écrire :
Fr= – K
r2r = k
# «
OMket K = cte
• si K < 0, la force est répulsive ;
• si K > 0, la force est attractive.
2

Deux cas sont très souvent rencontrés :
• interaction entre deux masses m1et m2:
K = Gm1m2
• interaction entre deux charges q1et q2:
K=– q1q2
4π r0
Pour une force centrale newtonienne :
dEp
dr =K
r2=⇒Ep= –K
r+ cte
On choisit souvent Ep(r = +∞) = 0 ce qui impose cte = 0 d’où :
Ep= –K
r
2 Conservation du moment cinétique et conséquences
2.1 Théorème du moment cinétique
On étudie le mouvement d’un point M de masse m soumis à une force (ou un ensemble de forces)
extérieure
#«
F , se déplaçant à la vitesse #«
v dans un référentiel galiléen.
Le moment cinétique de M en O est :
#«
σO=
# «
OM ∧m#«
v
Rem : #«
σOest aussi noté
#«
LO.
On peut calculer la dérivée par rapport au temps de #«
σO:
d#«
σO
dt =d
# «
OM
dt ∧m#«
v +
# «
OM ∧md#«
v
dt
Si O est un point fixe 1:
d
# «
OM
dt =#«
v
Dans ce cas : d#«
σO
dt =
# «
OM ∧md#«
v
dt =
# «
OM ∧
#«
F
Ce résultat à un nom : il s’agit du théorème du moment cinétique (TMC) en O :
d#«
σO
dt =
# «
OM ∧
#«
F
Attention aux hypothèses : M doit être un point matériel et O un point fixe.
1. Attention, si O n’est pas fixe, d
# «
OM
dt =#«
v (M) – #«
v (O), où #«
v (M) est la vitesse de M et #«
v (O) la vitesse de O.
3

2.2 Conservation du moment cinétique et conséquences
2.2.1 Mouvement plan
Si
#«
F est une force centrale :
d#«
σO
dt =
# «
OM ∧
#«
F =
#«
0 =⇒#«
σO=# «
cte
car
# «
OM = r #«
eret
#«
F = Fr
#«
ersont colinéaires.
Or #«
σO=
# «
OM ∧m#«
v , donc
# «
OM et #«
v sont orthogonaux à un
vecteur constant. Par conséquent, le mouvement de M est
plan.
#«
σO
O•
Le mouvement de M se situe dans le plan passant pas O et orthogonal à #«
σO
2.2.2 Constante des aires
On note (Oxy) le plan du mouvement. L’axe (Oz) est donc porté par le vecteur #«
σO. On peut donc
utiliser les coordonnées polaires.
#«
F = Fr
#«
er
# «
OM = r #«
er
#«
v = ˙
r#«
er+ r ˙
θ#«
eθ
Le moment cinétique de M en O est donc :
#«
σO=# «
cte =
# «
OM ∧m#«
v = mr2˙
θ#«
ez=⇒r2˙
θ= cte = C
C est nommée constante des aires.
Rem : r2˙
θ= cte implique que ˙
θest de signe constant. Par conséquent, le mouvement se fait
toujours dans le même sens. En plaçant #«
σOselon +#«
ez, i.e. r2˙
θ> 0, le mouvement s’effectue dans
le sens positif : ˙
θ> 0.
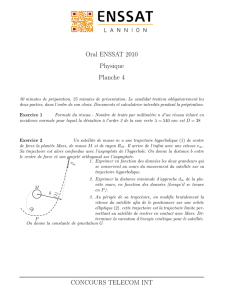
2.2.3 Interprétation géométrique
On peut écrire :
# «
OM(t) = r(t) #«
er(t) = r #«
er
# «
OM(t + dt) =
# «
OM(t) + d
# «
OM(t) = r #«
er+ dr #«
er+ rdθ#«
eθ
L’aire balayée pendant dt par le vecteur
# «
OM est :
dA = (r + dr) r dθ
2–drrdθ
2=r2dθ
2
On a donc :
dA
dt =r2˙
θ
2=C
2
dA
dt est nommé vitesse aréolaire 2.
# «
OM(t)
r
# «
OM(t + dt)
r + dr
d
# «
OM(t)
dr
rdθ
dθ
2. Attention : ce n’est pas une vitesse.
4

En supposant que A(t = 0) = 0 :
A(t) = C
2t
On aboutit à la loi des aires ou deuxième loi de Kepler :
Pendant des durées égales, le vecteur position balaye des aires égales
•
O
M
r
•
∆t
∆t
3 Forces centrales newtoniennes : étude énergétique
3.1 Energie potentielle effective
Dans la suite, on se limite à une particule soumise à une force centrale newtonienne.
L’énergie mécanique est :
Em=1
2mv2–K
r=1
2m(˙
r2+ r2˙
θ2) – K
r
La force étant conservative, l’énergie mécanique est conservée :
Em= cte
On a déjà rencontré des systèmes conservatifs à un degré de liberté mais, ici, le problème est plus
compliqué car il y a, à priori, deux degrés de liberté : r et θ.
Nous allons nous ramener à un problème à degré de liberté en utilisant la constante des aires :
C=r2˙
θ
On peut écrire :
Em=1
2m˙
r2+1
2mC2
r2–K
r
| {z }
Ep,eff(r)
Em=1
2m˙
r2+ Ep,eff(r)
Ep,eff est nommée énergie potentielle effective.
3.2 Trajectoires
On a :
Ep,eff =1
2mC2
r2–K
r
Pour tracer l’allure de Ep,eff, on distingue deux cas.
5
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%