f hgikj f hgikj

1/2
CHAMPNEW17
La Terre étant supposée sphérique de centre O et de masse M, on veut lancer un satellite de masse m sur une orbite circulaire de rayon r
0
en lui communiquant au point de largage P
0
une vitesse convenable v
0
perpendiculaire à OP
0
.
1) Calculer v
0
et l’énergie totale E
0
du satellite sur son orbite.
2) Au moment du largage en P
0
, les données sont les suivantes: r = r
0
, la vitesse
v
est perpendiculaire à
OP
0
→
mais en module
v = v
0
+ δv avec |δv| << v
0
. Calculer le demi grand-axe a de la trajectoire elliptique obtenue (on pourra utiliser l’expression de l’énergie mécanique).
3) Calculer l’écart relatif δT/T de la période obtenue à la période prévue. Quelle valeur maximale de δv/v
0
peut-on tolérer pour un satellite
géostationnaire si l’on veut que sa rotation par rapport à la Terre n’excède pas un jour par an ?
Corrigé
1) Dans le référentiel géocentrique, le satellite n’est soumis qu’à la force de gravitation, qui
s’exprime
F
Mm
r
e P= −G
2r
( ) dans la base sphérique de centre O.
La deuxième loi de Newton s’écrit alors ma P F
( ) =. Dans la base choisie,
l’accélération s’écrit
a P v
r
e P( ) ( )= − 0
2
0
r car, dans le cas d’une force centrale, une
trajectoire circulaire correspond nécessairement à un mouvement uniforme d’après
la loi des aires.
On en déduit mv
r
Mm
r
0
2
0
0
2
=G d’où vM
r
0
0
=G
.
De manière générale, l’énergie mécanique totale est E = E
C
+ E
P
avec
E mv
C
=
1
2
2
et
E
Mm
r
P
= −G
dans le champ de gravitation.
Pour la trajectoire circulaire, on trouve
E mv mv
0 0
2
0
2
1
2
= −
soit
E mv
0 0
2
1
2
= −
ou encore
E
Mm
r
0
0
1
2
= − G
.
2) À l’instant du lancement l’énergie du satellite est E mv
Mm
r
= −
1
2
2
0
G
avec v = v
0
+
δ
v
= vv
v
0
0
1
+
F
H
G
I
K
J
δ
. Comme
δ
v << v
0
, on peut écrire E mv v
v
Mm
r
= +
F
H
G
I
K
J
−
1
21 2
0
2
0 0
δ
...
G
= +
E mv
v
v
0 0
2
0
1
2
δ
= −
F
H
G
I
K
J
Ev
v
0
0
1 2
δ
.
Or l’énergie du satellite sur une trajectoire elliptique de demi grand-axe a vaut
E
Mm
a
= −
1
2
G
. On en déduit
− = −
F
H
G
I
K
J
−
F
H
G
I
K
J
1
2
1
21 2
0 0
G G
Mm
a
Mm
r
v
v
δ
d’où
a
r
v
v
=
−
0
0
1 2 δ ce qui se développe en a r v
v
= +
F
H
G
I
K
J
0
0
1 2 δ.
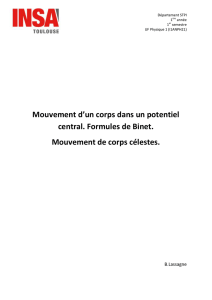
Au point P
0
, la vitesse est perpendiculaire au rayon vecteur donc ce
point est le périgée ou l’apogée de la trajectoire.
3) Sur la trajectoire circulaire, la période de rotation est
T
r
v
00
0
2
=
π
=2
0
3
πr
M
G
.
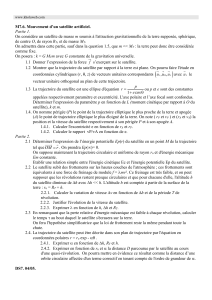
v
0
r
0
O
P
0
v
r
0
O
P
0
2a

2/2
Sur la trajectoire elliptique, on a
Ta
M
=2
3
πG= +
F
H
G
I
K
J
2 1 2
0
3
0
3
2
πδr
M
v
vG= + +
F
H
G
I
K
J
Tv
v
0
0
1 3δ... .
On a donc
T
T
T
v
v
−
=
0
0 0
3
δ
soit
δ
δ
T
T
v
v
0 0
3=.
On veut δT
T
0
1
365
< donc il faut
δ
v
v
0
1
3 365
<( )( ) ≈ 10–3. La précision sur le module de la vi-
tesse est donc
δ
v
v
0
0 1%=,.
1
/
2
100%