RDM Cours 1/8
R.D.M.
Résistance des Matériaux
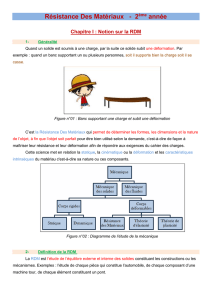
1 – BUT DE LA R.d.M.
La résistance des matériaux est la mécanique des solides déformables. Elle permet de :
Caractériser les matériaux ;
Dimensionner une pièce à partir des efforts qu’elle supporte ;
Déterminer la déformation d’une pièce à partir des efforts qu’elle supporte ;
Déterminer les efforts maximums que peut supporter une pièce (ex : pont roulant).
2 - HYPOTHESES DE LA R.d.M.
2 1 - Sur le matériau
Il doit être :
Continu (arrangement de sa structure cristalline continue ) ;
Homogène (structure identique en tout point) ;
Isotrope (mêmes propriétés mécaniques en un point de la structure dans toute les directions).
2 2 - Sur la géométrie des pièces
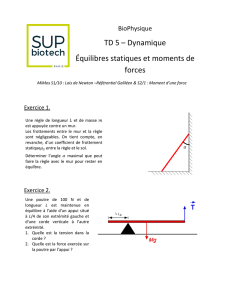
On étudiera en RdM uniquement des solides ayant la forme d’une poutres :
La ligne moyenne d’une poutre est le lieu des centre de gravité ou centres de surface ou
barycentres A, ...G, ...B des sections successives ;
Les sections droites sont des sections planes et perpendiculaires à la ligne moyenne de
la poutre ;
Les sections droites doivent rester constante ou ne varier que très progressivement entre
A et B.
G
Ligne moyenne
Section droite plane
A
B
2 3 - Sur les charges appliquées sur les pièces
Plan de symétrie
Les charges supportées par la poutre sont contenues dans le plan de symétrie ;
Elles pourront être concentrées ou réparties ;
Les résultats obtenus en RDM ne seront valables qu’a une distance suffisante des points
d’application des forces (hypothèse de Barré de Saint-Venant).
2.4 - Sur les déformations
Au cours de la déformation, les sections droites restent planes et
perpendiculaires à la ligne moyenne (hypothèse de Navier Bernoulli).
Les déformations restent faibles comparativement aux dimensions de
la poutre.

RDM Cours 2/8
3 - TORSEUR DE COHÉSION DANS UNE SECTION PLANE
Les efforts intérieurs ou de cohésion sont les efforts qui agissent à l’intérieur des poutres et qui assurent
l’équilibre ou la cohésion de la structure sous l’action des charges extérieures exercées.
La connaissance des ces efforts de cohésion nous renseignera sur l’état de sollicitation de la poutre
étudiée, et permettra d’évaluer sa résistance aux efforts qui lui sont appliqués.
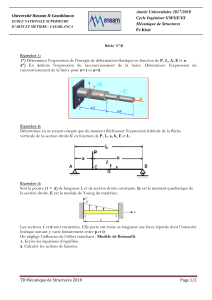
3.1 – Principe de calcul
Pour mettre en évidence les efforts transmis par la matière au niveau d’une section droite d’une
poutre, nous effectuons une coupure imaginaire par un plan perpendiculaire à la fibre moyenne. Ce plan
définit une section S de barycentre G qui divise la poutre en deux tronçons fictifs (AG et GB). Chaque
tronçon est en équilibre et l’application du Principe Fondamental de la statique, à l’un ou à l’autre,
permet d’identifier et de calculer les efforts intérieurs exercés entre les deux tronçons au niveau de la
coupure.
G
Plan de coupe imaginaire
AB
y
z
x
→
1
F
→
3
F
→
2
F
→
4
F
G
A
y
z
→
1
F
→
3
F
x
→ 1/2
G
M
1
2
→
1/2
R
1
B
G
y
z
→
2
F
→
3
F
x
→ 2/1
G
M
→
2/1
R
2
Les actions mécaniques entre les deux tronçons sont
des efforts intérieurs à la poutre que l’on peut modéliser par un
torseur appelé Torseur de Cohésion
{ }
coh
T
et dont les
éléments de réduction au point G centre de surface sont :
une résultante
→
R
, et un moment résultant
→
G
M
{ }
=
→
→
G
G
coh
M
R
T
Deux conventions d’écriture sont possibles.
Conventions 1 : le torseur de cohésion modélise les actions mécaniques de la partie (2) sur la
partie (1) ;
Conventions 2 : le torseur de cohésion modélise les actions mécaniques de la partie (1) sur la
partie (2).
Pour la suite, nous adopterons la CONVENTION 1 tout à fait arbitrairement.
Pour déterminer ce torseur de cohésion il suffit d’effectuer l’équilibre statique du tronçon (1) ou du
tronçon (2).
Etude de l’équilibre du tronçon (1) ou de la partie gauche
{ }
{ }
{ } { }
−
−
=
=
=
⇒−=⇒
=
+
=
→ →
→ →
→
→
→→
→
→
→
→
→→
→
1,
1
1/2,
1/2
1
1
1311
0
extG
ext
G
GG
G
extcoh
ext
FFcoh
M
R
MM
RR
TT
T
TTT
444 3444 21

RDM Cours 3/8
Définition1 :
le torseur de cohésion au centre de surface G d’une surface droite de poutre se défini
en effectuant la somme des torseurs, au même point G, des actions mécaniques agissant à gauche de
la section droite, somme précédée du signe
-
.
Etude de l’équilibre du tronçon (2) ou de la partie droite
Comme
{ }
−==
−==
=
→→→
→→→
2/1,1/2,
2/11/2
GGG
G
coh
MMM
RRR
T
alors
{ } { }
=
−==
−==
=−=
→ →
→ →
→→→
→→→
→
2,
2
2/1,1/2,
2/11/2
2
extG
ext
G
GGG
G
extcoh
M
R
MMM
RRR
TT
Définition 2 :
le torseur de cohésion au centre de surface G d’une surface droite de poutre se défini
en effectuant la somme des torseurs, au même point G, des actions mécaniques agissant à droite de
la section droite, somme précédée du signe
+
.
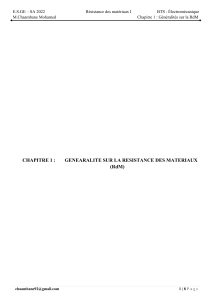
3.2 - Exemple de calcul de torseur de cohésion
Soit une poutre reposant sur 2 appuis et soumise à une force
→
F
x
y
→
F
Modèle de la poutre
A
C
y
x
→
F
Données
5714
0
14285
0
20000
0
→→→
−BAF
Détermination du torseur de cohésion
On décompose la poutre en deux zones : [AC] et [CB].
Zone [AC]
Nous allons déterminer le torseur de cohésion au centre de surface G
1
d’une section de poutre située
entre A et C, repérée par l’abscisse x.
Le torseur de cohésion au point G
1
se détermine en effectuant la somme des A.M. agissant à gauche
de la coupure, somme précédée du signe «
-
» (voir définition 1 ressource page 3/7).
x
A
C
→
P
G
1
y
x
{ } ( )
NmMf;Tax Mf;Tx
Yx
Y
x
x.Y.xMf YT
Yx
Y
AGA
A
cohT
zy
zy
A
A
Az
Ay
A
A
G
G
1714214285
0142850
0
0
0
0
0
0
14285
14285
0
0
00
11
11
1
1
1
1
=−== =−==
=∧
−
−
−== −=−=
−=
∧−
−
=
→→
→
Zone [CB]
Pour la détermination de ce torseur de cohésion, il est préférable d’utiliser l’autre définition
Le torseur de cohésion au point G
1
se détermine en effectuant la somme des A.M. agissant à droite de
la coupure, somme précédée du signe « + » (
voir définition 2 cours RdM page 3
).

RDM Cours 4/8
x
A
C
→
P
G
2
y
x
B
{ } ( )
( )
( )
( )
( )
0571424 17142571421
571424
5714
0
0
0
0
0
0
5714240
05714
00
12 12
2
2
2
2
2
=== ===
+−= ==
++−
=∧
++−
+−
=
∧
=
→→
→
zy zy
zBy
B
B
G
G
G
MfTx NmMfTx
xMf YT
Ybax
Y
bax
x
AGB
B
cohT
;, ;,
.,
.
.,
3.3 – Composantes des efforts intérieurs ou du torseur de cohésion
Les composantes du torseur de cohésion se notent conventionnellement comme ci-dessous :
N
(S)
→
G
R
x
y
Ty
Tz
G
→
G
M
Mt
Mfz Mfy
z
{ }
( ) ( )
zyxG
zyx
G
G
G
MfzTz
MfyTy
MtN
M
R
cohT
r
rr
r
rr ,,
,,
.=
=
→
→
N
: effort normal ;
T
Y
: effort tranchant suivant y ;
T
Z
: effort tranchant suivant y.
M
t
: moment ou couple de torsion ;
Mf
Y
: moment fléchissant ou moment de flexion suivant y ;
Mf
Z
: moment fléchissant ou moment de flexion suivant z.
4 –
IDENTIFICATION DE LA NATURE DES SOLLICITATIONS
SOLLICITATIONS SIMPLES
Exemple Torseur de cohésion Sollicitation
→
F
x
→
−
F
{ }
( )
z,y,xG
N
.cohT
rrr
00 00 0
=
TRACTION
(pour la compression, les
vecteurs forces sont en
sens inverse)
→
F
x
→
−
F
y ou z
{ }
( )
( )
z,y,xG
z,y,xG
Tz
ou
Ty.cohT
rrr
rrr
0
00 00
00 0
00
=
=
CISAILLEMENT
→
t
M
x
→
−
t
M
{ }
( )
z,y,xG
Mt
.cohT
rrr
00 00
0
=
TORSION

RDM Cours 5/8
x
fz
M
fz
M−
{ }
( )
( )
z,y,x
fy
G
z,y,x
fz
G
Mou
M
.cohT
rrr
rrr
00
0
00
0
00
00
=
=
FLEXION PURE
SOLLICITATIONS COMPOSÉES
Exemple Torseur de cohésion Sollicitation
x
→
F
{ }
( )
( )
z,y,x
z
fy
G
z,y,x
fz
y
G
TMou
M
T.cohT
rrr
rrr
0
0
00
0
0
00
=
=
FLEXION PLANE
SIMPLE
x
→
F
→
N
→
−
N
{ }
( )
( )
z,y,x
z
fy
G
z,y,x
fz
y
G
TM
N
ou
M
T
N
.cohT
rrr
rrr
0
0
0
0
0
0
=
=
FLEXION
+
TRACTION
x
→
F
t
M
t
M
−
{ }
( )
( )
z,y,x
z
fy
t
G
z,y,x
fz
y
t
G
TM
M
ou
M
TM
.cohT
rrr
rrr
0
0
0
0
0
0
=
=
FLEXION
+
TORSION
x
→
−
F
→
−
F
{ }
( )
z,y,x
fz
G
M
N
.cohT
rrr
0
00
0
=
FLAMBAGE
5 – NOTION DE CONTRAINTE
(S)
x
y
G
z
ds
M
→
df
ds
M
→
σ
→
τ
( )
→ n,MCr
x
( )
→→
→
→ =
τ+σ=
ds
df
C
n,M r
σ
: contrainte normale ;
τ : contrainte tangentielle
L'unité de la contrainte est le
Pascal : 1 Pa = 1 N / m
2
Le torseur de cohésion schématise les actions de cohésion s’exerçant dans une section droite de la
poutre, il constitue donc une représentation globale. Pour avoir une représentation plus détaillée en
chaque point de la section, nous utiliserons la notion de contrainte.
 6
7
8
6
7
8
1
/
8
100%