Cinématique graphique
0
1
2
3
4
A
BC
IH
Lycée Vauban, Brest – PTSI –
( )
50v H, /
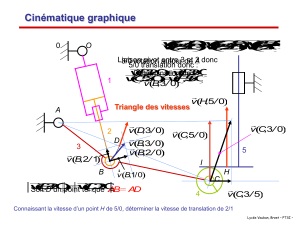
Connaissant la vitesse d’un point Hde 5/0, déterminer la vitesse de translation de 2/1
O
( )
50v C, /
( )
35v C, /
( )
30v C, /
( )
30v D, /
( )
30v B, /
D
( )
21v B, /
()()()
30 35 50vC,/ vC,/ vC,/=+
5/0 translation donc :
( )( )
50 50vC,/ vH,/=
3/0 rotation autour de A
Détermination de
( )
30v B, /
AB AD=
Soit Dun point tel que
Triangle des vitesses
( ) ( )
30 30vB,/ vD,/=
( )()()
20 21 10vB,/ vB,/ vB,/=+
( )
20v B, /
( )( )
20 30vB,/ vB,/=
Liaison pivot entre 3 et 2 donc
5
( )
,1/0vB
r

Cinématique graphique
Lycée Vauban, Brest – PTSI –
y
B
P
A
C
Bras
Tirant
Coulisseau
Corps
Sens de
sortie du
coulisseau
x
O
Actionneur
linéaire
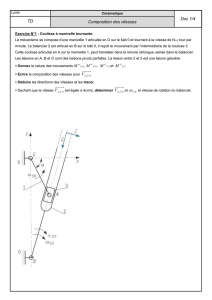
( )
10v A, /
( )
20v B, /
0
1
2
3
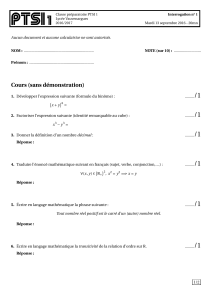
équiprojectivité
( )
30v P, /
( ) ( )
20 20vA,/ABvB,/ABЧ= Ч
( )( )
30 20vB,/ vB,/=
Liaison pivot 3/1 d’axe passant par A
( )
30v B, /
I30
Liaison pivot 3/2 d’axe passant par B
( ) ( )
30 10vA,/ vA,/=
Triangle des vitesses
Le CIR du mouvement de 3/0 est à
l’intersection des perpendiculaires aux
vitesses de Aet Bpar rapport à0
( )
30v A, /
( )
( )
30 30vA,/ vA,/
ў
=
A’A’
Connaissant la vitesse de A 1/0, déterminer la vitesse de P 3/0.

Cinématique graphique
Lycée Vauban, Brest – PTSI –
( )
,2/0vA
r
( )
2/0w
r
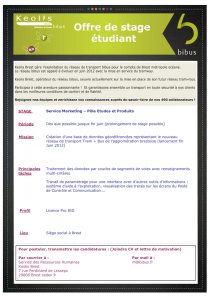
déterminer
( )
,2/1vA
r
et
Connaissant
( )
1/0w
r
( )
,2/0vA
r
( )
,1/0vA
r
( )
,2/1vA
r
( )( )( )
,2/0 ,2/1 ,1/0vA vA vA=+
r r r
1/0 rotation d’axe (O,z)
2/1 translation de direction AH
2/0 rotation d’axe (B,z)

Cinématique graphique
Lycée Vauban, Brest – PTSI –
0
4
32
1
0
A
O
B
D
C
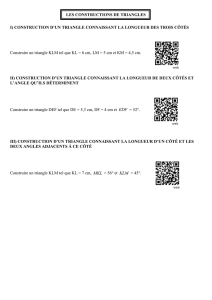
Déterminer la vitesse de rotation du piston 4/0, connaissant le taux de rotation 1/0.
( )
,1/0vA
r
équiprojectivité
Direction de la vitesse de B/0
( )
,2/0vB
r
Composition des vitesses et Bsur l’axe de la liaison pivot 2/3
( ) ( )
,3/0 ,2/0vB vB=
rr
( )
,3/0vB
r
Composition des vitesses en Dentre 4, 3 et 0
()()()
,3/0 ,3/4 ,4/0vDvDvD=+
r r r
Triangle des vitesses
( )
,3/0vD
r
Direction de la vitesse de D 4/0
Direction de la vitesse de D 4/3
( )
,3/4vD
r
( )
,4/0vD
r
1
/
4
100%