DS6 : Mécanique – corrigé 1 Vol en montée 2 Vol en virage

DS6 : Mécanique – corrigé
Exercice 1
1 Vol en montée
A=p
G
~
P
~
Fp
~
Fm
~
Ft
~
P+~
Fm+~
Fp+~
Ft=~
0
(Ox0) (Oz0)
(Ox0) : Ft+mg A=Fm
(Oz0) : mg A=Fp
Fp=1
2ρSv2Cp v
v=s2mg A
ρSCp
~
F ~v P=~
F .~v
Pm=k~
Fmkv
[Pm0] = "mg Ct
Cps2mg
ρSCp#=×∅×s
−=q − −= −
[Pm0] =p−= −=
f0= 30 Pm0=
Pm' Pm0(1 + f0A)
A=1
f0Pm
Pm0−1'·− ',
vz=v A=q2mg A
ρSCp A A vz=, −
η=Fp
mg =(A) η < 1
2 Vol en virage

~urφ
G
~
P
~
Fp
~a =−v2
R~ur
~
P+~
Fm+~
Fp+~
Ft=−mv2
R~ur
~ur ~uz
(~ur)−Fp φ=−mv2
R
(~uz)Fp φ=mg
R=v2
g φ
η=Fp
mg =1
φ
η < 2 φ > 1
2 φ < φ < √3 R > v2
g√3
Exercice 2
~
N
α
~
P
~
F1
~
N~
T
β
à vitesse constante
~ex −F1+T β−P α= 0
T=F1+P α
β T=
~
P ~
N
~
F2
~
N
~
P
~
F2
Ox m¨x=−F2
˙x(t) = ˙x(0)−F2
mt
x(t) = ˙x(0)t−F2
2mt2+x(0) tf=m˙x(0)
F2
d=x(tf)−x(0) = m˙x2(0)
2F2 d',
−F3+mg α0= 0 F3=mg α0=kv2
l
vl=qmg α0
k', /α0
~
P
~
F1~
N

~
P
x y ¨x= 0 ¨y=−g
x(t) = v0xt
y(t) = v0yt−1
2gt2 v0x=v0 γ v0y=v0 γ
F y(tf) = − =v0ytf−1
2gt2
f
tf', D=x(tf) = v0xtf'
Exercice 3
poids du hamsterle poids de la roue réaction de l’axe de rotation
R
Pa
F
Pr
L∆=J∆ω
dL∆
dt =J∆dω
dt =M∆(~
Pa) = mgR θ0
dω
dt =mgR θ0
J∆
ω(t) = mRg θ0
J∆t
Ec(t) = 1
2J∆ω(t)2 EC(t) = (mRg θ0)2
2J∆t2
v ω=v
R
t=J∆ω
mRg θ0',
Ec=1
2J∆ω2=
θ0= 0
mRg θ0 mRg θ0−Γ∆
mRg θ0−Γ∆= 0 θ0= Γ∆
mRg
ω0=v0
R
son énergie cinétique est nulle
Ep=mgh =−mgR
EcR =1
2J∆ω2
0
Em=−mgR +1
2J∆ω2
0
ω0 ω1
EcH =1
2mv2=1
2mR2ω2
1
1
2J∆ω2
0−mgR =1
2J∆ω2
1−mgR +1
2mR2ω2
1 ω1=ω0sJ∆
J∆+mR2

Em=1
2J∆ω2
| {z }
EcR
+1
2mR2ω2
| {z }
EcH
−mgR θ
| {z }
Ep
=1
2(J∆+mR2)ω2−mgR θ
1
2(J∆+mR2)ω2−mgR θ=1
2(J∆+mR2)ω2
1−mgR ω=sω2
1−2mgR(1 − θ)
J∆+mR2
~
P=m~g
~
K
~ar=
−Rω2~er
~a =−Rω2
1−2mgR(1 − θ)
J∆+mR2~er
θ=π ~er
−mg −K=mar=−mR ω2
1−4mgR
J∆+mR2 K=mR ω2
1−4mgR
J∆+mR2−mg
K < 0
ω0
ω0 R
J∆
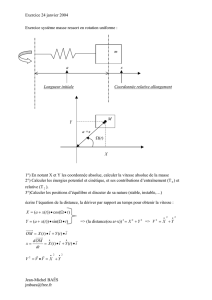
Exercice 4
m
~
P=m~g ~
T
~
T=−m~g
h(t) =
−rθ(t)
m h(t)
Oz m¨
h(t) = T−mg
J∆˙ω=M∆(~
T) = rT.
T=m(g−r¨
θ)
J∆˙ω=mr(g−r˙ω) ˙ω
α= ˙ω=mrg
J∆+mr2
a=−rα =−mr2g
J∆+mr2 |a|=g1
1 + J∆/mr2< g
g
a', − α', −
m Ec=
−mgh
~e∆
r
θ(t)
M
m
z
h
0
~
Tc
~
Tm
~
P
||~
Tm|| =||~
Tc|| =T
1
/
4
100%