Moteur synchrone auto-commut

HEIG-Vd Entraînements réglés (MET2)
Chapitre 1
Entraînement avec machine
synchrone auto-commutée
1.1 Introduction et buts du chapitre
Dans le domaine des servo-entraînements, pour une gamme de puissance al-
lant de quelques centaines de watts à quelques dizaines de kilowatts, le moteur
synchrone auto-commuté est de plus en plus utilisé en remplacement du moteur
DC à collecteur et, selon les prévisions son marché va continuer à s’étendre consi-
dérablement d’ici à l’an 2004. Comme servo-entraînement, le moteur synchrone
est à excitation constante par aimants permanents en terres rares, comme le
Samarium-Cobalt (disponible dès 1970) ou le Néodyme-Fer-Bore (dès 1980), voire
en ferrite pour des moteurs moins performants mais plus économiques.
Incontestablement, il s’agit d’un entraînement hautes performances qui bénéfi-
cie d’un avantage déterminant par rapport au moteur DC : l’absence de collecteur,
puisqu’hormis les roulements, il n’y aucun contact mécanique entre la partie fixe
(le stator) et la partie mobile (le rotor).
L’objectif de ce chapitre est de donner un aperçu des techniques de pilotage de
la machine synchrone auto-commutée en vue de son utilisation dans le domaine
des entraînements à vitesse variable. La structure est calquée sur le chapitre consa-
cré à la machine DC à collecteur : après une première mise au point importante
concernant le fonctionnement et les différences entre les machines DC brushless
("moteur à courant continu sans collecteur", § ??) et AC brushless ("machine
synchrone auto-commutée", § ??), le modèle mathématique de cette dernière
sera établi (§ ??). L’alimentation par convertisseur de fréquence sera ensuite étu-
diée et un modèle dynamique devra en être obtenu avant de pouvoir aborder
la commande en couple/courant de la machine (§ ??). Une première réalisation
consistera à mettre en oeuvre un régulateur de courant par phase (commande
scalaire) et les limites de cette commande seront mises en évidence (§ ??). Fina-
lement, une stratégie de pilotage plus évoluée appelée commande vectorielle
Chapitre 3, v.1.5 1MEE \cours_er.tex\6 mars 2006

HEIG-Vd Entraînements réglés (MET2)
Te m
Te m c
A s s e r v i s s e m e n t
d e c o u p l e
C h a r g e
m é c a n i q u e
C a p t e u r d e
v i t e s s e
R é g u l a t e u r
d e v i t e s s e
S
-
c o n s i g n e
d e v i t e s s e
m e s u r e
d e v i t e s s e
v i t e s s e
M o d è l e s d e
l ' a l i m e n t a t i o n
e t d u m o t e u r
M o d è l e s d u
m o t e u r e t d e
l a c h a r g e
m é c a n i q u e
f _ 0 3 a _ 0 1 _ 1 . e p s
Fig. 1.1 – Schéma de principe de l’asservissement en vitesse et couple d’un servo-
entraînement électrique (fichier source).
sera présentée, ce qui nécessitera l’acquisition d’un certain bagage théorique sur
les phaseurs complexes (§ ??). L’ajustage du régulateur de vitesse ou de position
pourra alors se faire de la même manière que pour la machine DC, raison pour
laquelle ce point n’est pas traité dans le présent chapitre.
La figure ?? montre la structure générale de l’asservissement de vitesse, de
type cascade. Elle est strictement identique à celle de la machine DC à collecteur.
Le détail de l’asservissement de couple/courant apparaît à la figure ??.
Comme pour les autres chapitres de ce cours d’entraînements réglés, les ré-
férences bibliographiques sont volontairement détaillées et renvoient à la liste
d’ouvrages et d’articles donnée à la fin du polycopié.
1.2 Principe de fonctionnement de la machine syn-
chrone
1.2.1 Généralités
Le fonctionnement de la machine synchrone à aimants permanents est beau-
coup plus simple à comprendre que celui du moteur DC : le stator, muni d’un
enroulement polyphasé, triphasé dans la plupart des cas, est alimenté par un
système de tensions et courants créant dans l’entrefer un champ d’induction −→
Bri
tournant (figure ??).
Le champ −→
Bri a tendance à attirer le rotor, lequel est muni d’aimants per-
manents produisant le champ −→
Ba. De ce fait, les champs d’induction créés par le
stator et rotor ont tendance à s’aligner, raison pour laquelle un couple d’origine
électromagnétique prend naissance.
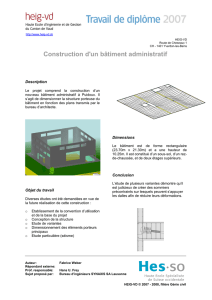
La figure ?? représente schématiquement une machine synchrone à aimants
permanents en exécution triphasée, possédant une seule paire de pôles (p= 1).
Chapitre 3, v.1.5 2MEE \cours_er.tex\6 mars 2006

HEIG-Vd Entraînements réglés (MET2)
us c
L o g i q u e d e
c o m m a n d e
C a p t e u r s d e
c o u r a n t
R é g u l a t e u r
d e c o u p l e / c o u r a n t :
c o m m a n d e s c a l a i r e
o u v e c t o r i e l l e
S
-
C o m m a n d e s
( c o n s i g n e s )
d e t e n s i o n
E t a g e d e
p u i s s a n c e
C o n v e r t i s s e u r d e f r é q u e n c e
usM a c h i n e s y n c h r o n e
&
c h a r g e m é c a n i q u e
is
T e n s i o n s
a p p l i q u é e s
a u m o t e u r
C o u r a n t s
a l i m e n t a n t
l e m o t e u r
C o n s i g n e s
d e c o u r a n t s
C o u r a n t s
m e s u r é s
is m
is c KT
Te m
C o u p l e
é l e c t r o - m a g n é t i q u e
M o d è l e d e
l ' a l i m e n t a t i o n
M o d è l e s d u
m o t e u r e t d e
l a c h a r g e
m é c a n i q u e
f _ 0 3 a _ 0 1 _ 2 . e p s
Fig. 1.2 – Détail de l’asservissement de couple/courant : le régulateur élabore
une commande u(t)prenant la forme de la tension qu’il juge bon d’appliquer
aux bornes des phases du moteur afin d’annuler l’erreur en courant mesurée
(fichier source).
Chapitre 3, v.1.5 3MEE \cours_er.tex\6 mars 2006

HEIG-Vd Entraînements réglés (MET2)
1
1 '
2
3
2 '
3 '
N
S
N
S
a x e p h a s e 1
a x e p h a s e 2
a x e p h a s e 3
a x e m a g n é t i q u e
d u r o t o r
B
a
B
r i
N
S
w
f _ 0 3 a _ 0 2 . e p s
Fig. 1.3 – Illustration du principe de fonctionnement d’une machine synchrone
à aimants permanents (fichier source).
Chapitre 3, v.1.5 4MEE \cours_er.tex\6 mars 2006

HEIG-Vd Entraînements réglés (MET2)
Les fabricants de tels entraînements les développent en général avec 2 à 4 paires
de pôles, l’un des critères de design étant la vitesse nominale du moteur. Bien
entendu, les bobinages des phases sont en réalité répartis sur toute la périphérie
de l’alésage et ne sont donc pas concentrés en une seule encoche comme la figure
pourrait le laisser croire. Les sens des courants indiqués définissent le sens qui
sera conventionnellement pris comme positif.
Comparativement à la machine DC, on voit que c’est le rotor qui joue le rôle
d’inducteur (excitation), l’induit étant alors au stator. Le rotor se met à tourner
à une vitesse angulaire ωcorrespondant (au nombre pde paires de pôles près) à la
pulsation ωsde l’alimentation triphasée, ce qui justifie la désignation de moteur
synchrone. Dans le cas triphasé, les axes magnétiques des trois enroulements
des phases statoriques sont décalés d’un angle électrique 2·π
3. Lorsque le moteur
est à une seule paire de pôles (p= 1), les décalages électrique et mécanique
correspondent.
1.2.2 Démarrage
Le démarrage de la machine synchrone est problématique si l’on ne dispose
pas d’une alimentation à fréquence variable. En effet, si par exemple la fréquence
de l’alimentation fs=ωs
2·πfait un saut brusque de 0à50 [Hz], comme par exemple
lors d’un enclenchement (exemple à ne pas suivre !) sur le réseau, le moteur ne
parvient pas à démarrer et décroche, son inertie et celle de sa charge l’empêchant
d’atteindre assez rapidement la vitesse de synchronisme. Il est donc nécessaire
de prévoir des dispositifs particuliers pour le démarrage, le plus répandu dans
le domaine des servo-entraînements étant le convertisseur de fréquence ou
onduleur triphasé, alimentation semblable au variateur de courant continu mais
permettant de créer un système de tensions et courants triphasés d’amplitudes
ˆ
Us,ˆ
Iset de fréquence fsvariables (§ ??).
1.2.3 Les aimants permanents ([?], chap.16 et chap.4, §4.2,
[?], Synchronous Motor Design, [?], §3.3.1)
Matériaux
Notons tout d’abord que c’est bel et bien le champ d’induction −→
Bacréé par
les aimants du rotor qui est de loin le plus élevé, alors qu’il est en fait souhaitable
que celui résultant de l’alimentation des enroulements statoriques soit faible (pro-
blème de la réaction d’induit). En fait, c’est plutôt le rotor qui attire le stator.
Ce dernier, fixé au bâti ne peut bien sûr pas se mettre en mouvement et c’est le
rotor, monté sur paliers, qui se met à tourner.
Les matériaux principaux pour les aimants permanents sont obtenus par frit-
tage (métallurgie des poudres). On a notamment :
Chapitre 3, v.1.5 5MEE \cours_er.tex\6 mars 2006
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
1
/
104
100%