Un toboggan a la forme ci-dessous : un plan incliné AB

P10 : Mécanique
DYNAMIQUE DES MOUVEMENTS TYPE : FICHE XII n°10 - CORRIGE
Mouvements divers
ENONCE DU PROBLEME :
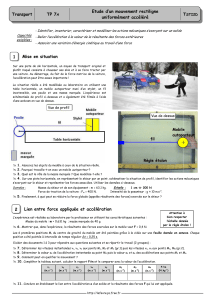
Un toboggan a la forme ci-dessous : un plan incliné AB', suivi d'une boucle circulaire
verticale, puis d'un second plan, incliné à 30°, B'C.
( AA' = 60 cm , A'B' = 1 m , BB’ = 28 cm , CC' = 20 cm )
1 ) Un mobile ( point matériel ) de masse m = 20g, est lâché sans vitesse initiale du point
A . Les pertes d'énergie par frottement sont négligeables . ( g = 10 m.s-2 )
a ) Etablir l'équation de son mouvement sur le trajet AB', en précisant le repère
choisi .
le mobile est soumis à deux forces : son poids P, vertical, vers le bas, et la réaction N du
support, normale, puisqu’il n’y a pas de frottements. N compense la composante de P
normale au plan. La résultante des forces est donc la projection F de P sur le plan : F =
P.AA’/AB’ = m.g.AA’/AB’ = m.a. L’accélération due à la pente est donc a = g.AA’/AB’ =
0,6g = 6m.s-2, parallèle à la ligne de plus grande pente. Si on prend comme repère le
droite AB’, avec A comme origine, et orientée positivement vers B’, la position à partir du
point de lancement est donnée par : x(t) = ½.a.t² = 3t² (v0 = 0, x0 = 0)
b ) Le mobile atteindra-t-il le point B ?
pour que le mobile atteigne le point B, il faut qu’il ait en ce point une vitesse suffisante
pour que le support exerce sur lui une force centripète qui, ajoutée au poids P = m.g, ait
pour résultante F = m.aN = m.v²/R ; ceci implique mv²/R > m.g, donc vB²> R.g = 0,14.10 =
1,4 ( vB = 1,18m.s-1). On peut calculer vB à l’aide du théorème de l’énergie cinétique : de B’
à B, le poids fournit un travail résistant W = - m.g.B’B ; donc ½.m. vB² = ½.m. vB’² -
m.g.B’B. La vitesse vB’ se calcule à partir de l’équation horaire ; en B’, x(t) = 3t² = 0,6, d’où
t² = 0,2 et t = 0,447s, ce qui donne une vitesse vB’ = 6.0,447 = 2,68m.s-1. D’où : vB² = vB’² -
2.g.B’B = 7,2 – 2.10.0,28 = 7,2 – 5,6 = 1,8 > 1,4 : le mobile atteindra B.
Si non, pourquoi ? Si oui, avec quelle vitesse ?
Puisque vB² = 1,8, vB = 1,34m.s-1.
2 ) Le mobile passe en B' avec une vitesse de 4 m.s-1 .
a ) Avec quelle vitesse a-t-il été lancé en A ?
d’après le théorème de l’énergie cinétique, l’énergie cinétique en B’ est égale à l’énergie
cinétique en A augmentée du travail fourni par le poids de A à B’ : ½.m.vB’² = ½.m.vA² +

m.g.A’A. Donc ½.m.vA² = ½.m.vB’² - m.g.A’A, soit vA² = vB’² - 2.g.A’A = 4² - 2.10.0,6 = 16 –
12 = 4, soit vA = 2m.s-1.
b ) En B, calculer la vitesse du mobile et son accélération normale.
Toujours d’après le théorème de l’énergie cinétique, l’énergie cinétique en B est égale à
l’énergie cinétique en B’ diminuée du travail fourni par le poids de B’ à B : ½.m.vB² =
½.m.vB’² - m.g.BB’ , soit vB² = vB’² - 2.g.BB’ = 4² - 2.10.0,28 = 16 – 5,6 = 10,4. D’où vB =
3,22m.s-1, et aN = vB²/R = 10,4/0,28 = 37,14m.s-2.
En déduire la réaction du support.
La résultante des forces doit avoir pour valeur
= m.B, où B est l’accélération du mobile en
B. En ce point, l’accélération tangentielle est
nulle, puisque la vitesse passe par un
minimum. L’accélération est donc normale, et
de valeur aN = vB²/R. est la somme du poids
= m. du mobile, et de la réaction du
support, qui est normale puisque et
sont deux forces verticales dirigées vers le
bas. D’ où : et
Finalement : N = F – P = m. vB²/R – m.g =
m (vB²/R – g) = 20.10-3.(37,14 – 10) ≈ 0,55N.
3 ) Après un tour de boucle, le mobile repasse en B' avec la même vitesse de 4 m.s-1.
a ) Expliquer pourquoi.
Puisqu’il n’y a pas de frottement, l’énergie mécanique du mobile se conserve ; l’énergie
potentielle au point B’ est la même avant et après le tour, donc l’énergie cinétique aussi.
b) Montrer que la vitesse en C sera vC = ( 12 )1/2m.s-1.
d’après le théorème de l’énergie cinétique, l’énergie cinétique en C est égale à l’énergie
cinétique en B’ diminuée du travail résistant fourni par le poids de B’ à C : ½.m.vC² =
½.m.vB’² - m.g.C’C. Donc vC² = vB’² - 2.g.C’C = 4² - 2.10.0,2 = 16 – 4 = 12, soit vC = (12)1/2
=√12 = 2√3 m.s-1.
4 ) Une fois que le mobile a quitté le plan incliné :
a ) Etablir les équations horaires du mobile .
Une fois que le mobile a quitté le plan incliné, la seule force qui agiy sur lui est son poids P
= m.g. Il subit donc l’accélération g de la pesanteur. Prenons un repère orthonormé C’xz,
où C’ x est horizontal, dans le plan de la figure, orienté positivement vers la droite, et C’z
un axe vertical orienté positivement vers le haut. Dans ce repère, l’accélération est = =
-10 ; comme = d/dt, = .t + , si on prend l’origine des dates quand le mobile passe
en C. Comme fait un angle de 30°avec l’horizontale, ses composantes sont vCx =
vC.cos30 = 2√3. √3/2 = 3m.s-1, et vCz = vC.sin30 = 2√3. 1/2 = √3m.s-1, d’où vz(t) = - g.t + vCz
= - 10t + √3. Or = d /dt ; donc : x(t) = vCx.t = 3t (x(0) = 0), et z(t) = - ½ .g.t² + vCz.t + zC
= -5t² + √3.t + 0,2.
b ) Endéduire l'équation de la trajectoire .
de x(t) = 3t, on tire t = x/3 qui, reporté dans z, donne : z(x) = - 5(x/3)² + √3.(x/3) + 0,2 = -
5x²/9 + x/√3 + 0,2.
c ) Calculer les coordonnées du point de chute .
avec l’origine choisie, le sol correspond à z = 0 = -5x²/9 + x/√3 + 0,2, équation du second
degré dont le discriminant est ∆ = 1/3 + 4.(5/9).0,2 = 8/3 = 2,66> 0. Il y a donc deux
solutions, dont une seule positive : x = (1/√3 + √8/3)/(10/9) ≈ 2m.
B’
P
N
F
B
v augmente
v diminue
1
/
2
100%