cours : systèmes d`équations

CHAPITRE 12
COURS : SYSTÈMES D’ÉQUATIONS
Extrait du programme de la classe de Troisième :
CONTENU COMPÉTENCES EXIGIBLES COMMENTAIRES
Système de deux
équations à deux
inconnues.
Résoudre algébriquement un sys-
tème de deux équations du premier
degré à deux inconnues admettant
une solution et une seule ; en don-
ner une interprétation graphique.
Pour l’interprétation graphique, on
utilisera la représentation des fonc-
tions affines.
Résolution de pro-
blèmes du premier
degré ou s’y rame-
nant.
Mettre en équation et résoudre un
problème conduisant à une équa-
tion, une inéquation ou un système
de deux équations du premier de-
gré.
Les problèmes sont issus des dif-
férentes parties du programme.
comme en classe de 4e, on dégagera
à chaque fois les différentes étapes
du travail : mise en équation, résolu-
tion de l’équation et interprétation
du résultat.
1 Equation à deux inconnues, système
Définition :
Une équation linéaire à deux inconnues xet yest une équation qui peut s’écrire sous la forme
ux +v y =w, où u,vet wsont trois nombres réels.
Un couple (x0;y0) de nombres réels sera un couple solution de cette équation si, lorsque l’on rem-
place xpar x0et ypar y0, l’égalité est vérifiée.
Par exemple, on considère l’équation 2x−4y=4.
Ïle couple (5; 2) äest
❒
✓, n’est pas un couple solution de cette équation, car 2 ×5−4×2=26= 4
Ïle couple (4; 1) ❒
✓est
än’est pas un couple solution de cette équation, car 2 ×4−4×1=4
Interprétation graphique des couples solutions :
En fait, si les nombres uet vsont non nuls, une telle équation admet une infinité de couples solu-
tions, qui sont les coordonnées des points de la droite (d) d’équation y=ax +b, où a= − u
vet b=w
v.
Dans notre exemple,
l’ensemble des couples solutions de l’équation 2x−4y=4
est donc constitué des coordonnées des points de la
droite (d) d’équation y=0,5x−1.
Nous pouvons lire quelques couples solutions de l’équa-
tion 2x−4y=4, comme (4; 1) et (−2;−2), ou encore (0; −1)
(voir ci-contre), mais on conçoit qu’il existe une infinité
de tels couples (un pour chaque point de la droite (d)).
O1
1
x
y
(d)
(4; 1)
(−2; −2)
(0; −1)
3ème Page 1/3 Cours systèmes

Définition :
Un système de deux équations linéaires à deux inconnues xet yest un système qui peut s’écrire
sous la forme ½ux +v y =w
u′x+v′y=w′où u,v,w,u′,v′et w′sont des nombres réels.
Résoudre un tel système consiste à déterminer, s’il y en a, tous les couples qui sont solutions des
deux équations à la fois.
Par exemple,½2x−4y=4
x−3y=6est un système a deux équations à deux inconnues.
Ïle couple (4; 1) ä, est
❒
✓n’est pas un couple solution de ce système, car ½2×4−4×1=4
4−3×1=16= 6
Ïle couple (−6; −4) ❒
✓, est
än’est pas un couple solution de ce système, car ½2×(−6) −4×(−4) =4
−6−3×(−4) =6
2 Méthodes de résolution d’un système
Nous allons résoudre par le calcul le système suivant, et ceci de deux manières différentes : ½2x−4y=4
x−3y=6
Première méthode : substitution
Etape 1 : On exprime, grâce à l’une des deux équations, une inconnue en
fonction de l’autre. Ici il est facile d’exprimer xen fonction de ygrâce à la
seconde équation : ½2x−4y=4
x=3y+6
Etape 2 : On substitue xpar 3y+6 dans la première équation : ½2(3y+6) −4y=4
x=3y+6
Etape 3 : On développe, on réduit et on résout l’équation d’inconnue y
ainsi obtenue : ½6y+12 −4y=4
x=3y+6
½2y+12 =4
x=3y+6
½2y= −8
x=3y+6
½y= −4
x=3y+6
Etape 4 : On remplace ypar sa valeur dans la seconde équation pour trou-
ver x½y= −4
x=3(−4) +6
½y= −4
x= −6
Etape 5 : On vérifie que les valeurs trouvées pour xet yconviennent : ½2×(−6) −4×(−4) =4
(−6) −3×(−4) =6
Etape 6 : On conclut : le système admet un unique couple solution, qui est (−6;−4).
3ème Page 2/3 Cours systèmes

Deuxième méthode : élimination par combinaison
Etape 1 : On multiplie une des équations (ou les deux) par
un (des) nombre(s) bien choisi(s), de façon que les coefficients
d’une même inconnue soient opposés. Ici on multiplie la se-
conde équation par −2 :
½2x−4y=4
−2x+6y= −12
Etape 2 : On additionne les deux équations membre à membre
pour éliminer l’une des inconnues, et on remplace l’une des
équations (par exemple, ici, la seconde) par l’équation ainsi ob-
tenue :
½2x−4y=4
(2x−4y)+(−2x+6y)=4+(−12)
½2y−4y=4
2y= −8
Etape 3 : On résout l’équation d’inconnue yainsi obtenue : ½2x−4y=4
y= −4
Etape 4 : On remplace ypar sa valeur dans la première équa-
tion pour trouver x½2x−4×(−4) =4
y= −4
Etape 5 : On résout l’équation d’inconnue xainsi obtenue : ½2x=4−16
y= −4
½2x= −12
y= −4
½x= −6
y= −4
Etape 6 : On vérifie que les valeurs trouvées pour xet y
conviennent : ½2×(−6) −4×(−4) =4
(−6) −3×(−4) =6
Etape 7 : On conclut : le système admet un unique couple solution, qui est (−6;−4).
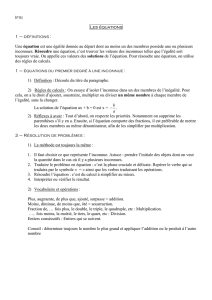
Interprétation graphique
ÏOn commence par transformer les deux équa-
tions du système, de façon à les mettre sous la
forme d’une équation de droite du type (y=ax +b).
½2x−4y=4
x−3y=6½−4y= −2x+4
−3y= −x+6½y=0,5x−1
y=1
3x−2
ÏDans un repère, on trace les deux droites corres-
pondant à ces deux équations.
Soit (d) la droite d’équation y=0,5x−1,
et (d′) la droite d’équation y=1
3x−2
les couples solutions de ce système sont les coor-
données des points communs aux deux droites,
s’il y en a.
O1
1
x
y
(d)
(d′)
x=−6
y=−4
3ème Page 3/3 Cours systèmes
1
/
3
100%