TD: Rotation d`une balle de jokari

TD: Rotation d’une balle de jokari
1 Position du probl`eme
Une balle de jokari de masse m= 50 g est fix´ee `a l’extr´emit´e d’un fil ´elastique de raideur k= 10 N.m−1
et de longueur au repos `0= 0,5 m. On n´eglige le rˆole de la pesanteur et du frottement de l’air; on ´etudie
seulement les mouvements de rotation de cette balle autour d’un point fixe.
La vitesse initiale ~v0est orthoradiale.
1. D´eterminer la valeur de ~v0pour laquelle le mouvement serait circulaire uniforme, le rayon du cercle ´etant
`1=`0+a. On appellera ω0la vitesse angulaire correspondante que l’on calculera. Application num´erique:
a= 0,05 m.
2. On s’´ecarte peu des conditions pr´ec´edentes, de sorte que le mouvement est presque circulaire. La distance
au centre est r=`1+xet la vitesse angulaire ω=ω0+ε.
a. ´
Ecrire, de fa¸con g´en´erale, les ´equations diff´erentielles v´erifi´ees, en coordonn´ees cylindriques, par r(t)
et θ(t).
b. Simplifier ces ´equations, en supposant x(t) et ε(t) infiniment petits du premier ordre.
c. R´esoudre les ´equations diff´erentielles avec les conditions initiales: x=x0,ε= 0 et vitesse initiale
orthoradiale. Trouver x(t), puis ε(t) et enfin θ(t).
D´eterminer l’arc angulaire θcorrespondant `a une p´eriode enti`ere des oscillations de x.`
A quelle
condition la courbe obtenue se refermera-t-elle sur elle-mˆeme (en supposant l’´ecart x0infinit´esimal) ?
Application num´erique: Calculer ω0pour que l’oscillation ait lieu 3 fois par tour. Mˆeme calcul si elle
a lieu une fois pour 3 tours.
3. ´
Ecrire le programme visualisant les trajectoires. On prendra x0= 0,1 m. Le centre de la trajectoire sera
bien ´evidemment en O.
Tracer sur le mˆeme graphique: le cercle de r´ef´erence de rayon `0+a+x0et la trajectoire correspondant `a
3 oscillations par tour; puis le cercle de r´ef´erence et la trajectoire correspondant `a 1 oscillation tous les 3
tours.
Solution
1. Pour un mouvement circulaire uniforme, le principe fondamental de la dynamique appliqu´e `a la balle donne:
m.v2
0
`1=k.(`1−`0) = k.a; soit: v0=qk.a.`1
met ω0=v0
`1=qk.a
m.`1
2. Le principe fondamental de la dynamique appliqu´e `a la balle donne: (~a.~ur=••
r−r.(
•
θ)2=−k
m.(r−`0)
~a.~uθ=d
dtr2.
•
θ= 0
avec les conditions initiales: ~v0.~ur= 0
~v0.~uθ=ω.(`0+a+x0)et r0=`0+a+x0
θ0= 0 .
Or, pour x= 0, on a: ε= 0 ⇒r=`0+a
r.ω2
0=k
m.a. .
Dans le cas g´en´eral, l’expression de l’acc´el´eration orthoradiale est nulle d’o`u: r2.
•
θ=cte
⇒(`0+a+x)2.(ω0+ε) = (`0+a+x0)2.ω0⇒(ω0+ε) = (`0+a+x0)2.ω0
(`0+a+x)2(1)
L’expression de l’acc´el´eration radiale, quant `a elle, s’´ecrit: ••
x−(`0+a+x).(ω0+ε)2=−k
m.(a+x)
⇒••
x−(`0+a+x0)4.ω2
0
(`0+a+x)3=−k
m.(a+x)⇒••
x−(`0+a+x0)4.ω2
0
(`0+a)3.(1 −3.x
`0+a)' − k
m.(a+x)
⇒••
x+h3.(`0+a+x0)4.ω2
0
(`0+a)4+k
mi.x ' −k.a
m+(`0+a+x0)4.ω2
0
(`0+a)3
On pose: ω2
x=h3.(`0+a+x0)4.ω2
0
(`0+a)4+k
miet −k.a
m+(`0+a+x0)4.ω2
0
(`0+a)3=ω2
x.xpart.
1

ISEN-Brest. Kany. TD: Rotation d’une balle de jokari
La r´esolution de: ••
x+ω2
x.x =ω2
x.xpart donne: x=A. cos(ωx.t +ϕ) + xpart de p´eriode Tx=2.π
ωx.
On d´eduit de (1):
(ω0+ε) = (`0+a+x0)2.ω0
(`0+a+x)2'(`0+a+x0)2.ω0
(`0+a)2.(1 −2.x
`0+a) = (`0+a+x0)2.ω0
(`0+a)2.(1 −2.A. cos(ωx.t+ϕ)+xpart
`0+a).
Pendant une p´eriode d’oscillation suivant x, l’angle θvarie de ∆θ=RTx
t=0(ω0+ε).dt
∆θ=(`0+a+x0)2.ω0
(`0+a)2.hTx−2.xpart .Tx
`0+ai=(`0+a+x0)2.ω0
(`0+a)2.2.π
ωx.(1 −2.xpart
`0+a)
Application 1: on impose 1 oscillation suivant xpendant 1
3de tour de θ; c’est-`a-dire: ∆θ=1
3.2.π.
Application 2: on impose 1 oscillation suivant xpendant 3de tours de θ; c’est-`a-dire: ∆θ= 3 ×2.π.
2 Code avec Mathematica
Jokari
Calcul num´erique
In[1]:= k=10;l0=0.5;a=0.05;x0=0.1;m=0.05;
In[2]:= Rref=l0+a+x0;
Graph0=ParametricPlot[{Rref Cos[Theta],Rref Sin[Theta]},{Theta,0,2 Pi}, AspectRatio->1];
In[4]:=omega=.;
Jokari[omega ]:=( t=.;r=.;Vtheta=.;Theta=.;tmax=2;
Ar=r’’[t]-r[t] (Theta’[t])^2; Atheta=D[r[t]^2 Theta’[t],t];
Vr[t ]:=r’[t]; Vtheta[t ]:=r[t] Theta’[t];
Fr=-k (r[t]-l0); Ftheta=0; Vr0=0; Vtheta0=omega*(l0+a+x0); r0=l0+a+x0; Theta0=0;
tmp=NDSolve[{
Fr == m Ar,Vr[0]==Vr0,r[0]==r0, Ftheta==m Atheta,Vtheta[0]==Vtheta0,Theta[0]==Theta0},
{r[t],Theta[t]},{t,0,tmax}]; R=r[t]/.tmp[[1]][[1]]; Theta=Theta[t]/.tmp[[1]][[2]];
Graph1=ParametricPlot[{R Cos[Theta],R Sin[Theta]},{t,0,tmax}, AspectRatio->1];)
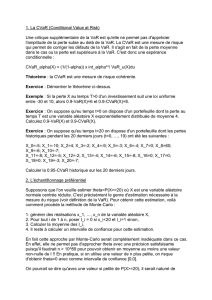
In[6]:= Jokari[4.9];Show[Graph1,Graph0]
Out[6]=
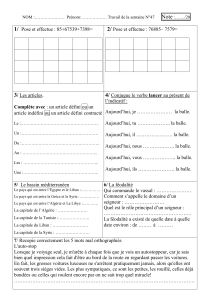
In[7]:= Jokari[9.5];Show[Graph1,Graph0]
2

ISEN-Brest. Kany. TD: Rotation d’une balle de jokari
Out[7]=
3 Code avec Python
# -*- coding: utf-8 -*-
import numpy as np
import matplotlib.pyplot as plt
import math
from scipy.integrate import odeint
3

ISEN-Brest. Kany. TD: Rotation d’une balle de jokari
4
1
/
4
100%