Physique. Devoir surveillé N°5.

PCSI. 05/06. 4heures. Calculatrice non autorisée.
Physique. Devoir surveillé N°5.
Les candidat(e)s veilleront à exposer leurs raisonnements avec clarté et précision, rédiger avec soin dans
un français correct, et reporter les numéros des paragraphes et sous-paragraphes dans la marge pour
chaque question.
Il est demandé de justifier clairement les relations utilisées.
Tous les résultats littéraux ou numériques devront être encadrés.
L'usage de la calculatrice étant interdit, il sera tenu compte des connaissances de cours des candidat(e)s
dans leurs exposés. Les applications numériques demandées peuvent être rapidement calculées à la main
à l’aide des nombres utiles fournis dans les énoncés ; la précision demandée est de deux chiffres
significatifs. Les valeurs numériques des grandeurs calculées ne sont pas prises en compte si elles ne sont
pas accompagnées des unités physiques correctes.
Les passages rédigés au crayon de papier ne sont pas pris en compte.
Problème 1. Comportement routier d'une automobile.
On se propose d'étudier quelques problèmes relatifs à la suspension d’un véhicule automobile et au
comportement dynamique de ce véhicule sur route déformée.
Données numériques et notations:
g accélération de la pesanteur (= 9,81 m.s-2)
t temps
z position verticale
,
z z
dérivées première et seconde de z par rapport au temps
jt
g Ge
représentation complexe d’une grandeur sinusoïdale g(t) = G cos (t-)
j
G Ge
amplitude complexe de g(t)
j2 = -1 j, nombre imaginaire
nombres utiles
44 6 6,
;
035 059, ,
;
235 15, ,
;
0556 075, ,
;
315 56, ,
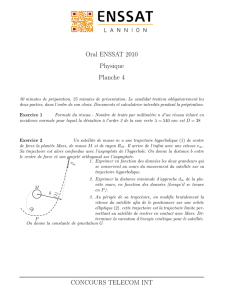
I. Modèle simplifié de la suspension
La suspension d’une automobile est habituellement assurée par quatre
systèmes identiques indépendants montés entre le chassis du véhicule
et chaque arbre de roue, et constitués chacun:
- d’un ressort métallique hélicoïdal de constante de raideur k et de
longueur à vide L0
- d’un amortisseur tubulaire à piston à huile fixé parallèlement au
ressort, exerçant une force résistante de frottement visqueux de
coefficient d'amortissement a de la forme
z
F azu
On suppose que la masse M du châssis est également répartie entre
les quatre systèmes. Les pneus de rayon extérieur R sont considérés
comme entièrement rigides et n’interviennent pas dans l’étude. Tous
les déplacements verticaux seront comptés algébriquement vers le
haut (
uz
, vecteur unitaire vertical).
I.1. Le véhicule étant immobile sans freins sur un sol horizontal, quelle est la longueur Le des ressorts au
repos et la garde au sol z0 du véhicule?
véhicule automobile
k
a
L
z
uz

I.2. Lors d’un essai dynamique à vide, le châssis est abaissé d’une hauteur h, puis brusquement libéré
sans vitesse initiale.
I.2.1. Etablir l’équation différentielle de la position verticale z(t) du châssis par rapport au sol sous la
forme
z z z
,
, , étant des constantes que l’on exprimera en fonction de a, k, M et z0.
I.2.2. On usine l’amortisseur de manière à obtenir un retour à la position d’équilibre final le plus bref
possible. Quelle doit être la valeur de en fonction de ? En déduire celle de a en fonction de M et
k.
I.2.3. Déterminer alors l’expression complète de la solution z(t) en fonction de z0, h et
02k
M
?
I.2.4. Tracer avec soin le graphe z(t) (on prendra pour échelles z0 = 1 ; h = z0/4 ; 0 = 1).
I.3. On effectue de nouveau le même essai en charge nominale, le véhicule contenant quatre masses
égales chacune à m également réparties sur les quatre systèmes {ressort-amortisseur}, la garde au sol
étant z’0.
I.3.1. Etablir la nouvelle équation différentielle vérifiée par z(t), et l’écrire sous la forme
z ' z ' z '
en exprimant les nouvelles constantes ’, ’ et ’ en fonction de a, k, M, m et z’0.
I.3.2. Montrer que dans ces conditions, le véhicule oscille.
I.3.3. Déterminer l’expression de la période T des oscillations autour de la position d’équilibre final en
fonction de k, M et m.
I.3.4. On souhaite obtenir T= /3 pour M = 1000kg et m = 100kg. En déduire la valeur de k puis de a.
II. Etude de la réponse harmonique
II.1. On étudie maintenant le comportement sur route difficile du véhicule avec ses quatre passagers de
masse m chacun.
II.1.1. On modélise la route rectiligne dans la direction x par
un sol ondulé sinusoïdalement autour de la cote de
référence horizontale 0 suivant la relation
e = em cos (x).
Quelle est la distance entre deux bosses exprimée en
fonction de ? Quelle est la pulsation des oscillations
verticales imposées aux roues si le véhicule roule sur cette
route à une vitesse constante V ?
II.1.2. On repère maintenant le châssis par sa position s(t) par
rapport à la cote de référence 0 liée au référentiel terrestre
supposé galiléen. On néglige le décalage angulaire du
point de contact pneu-route par rapport à la verticale.
La force de frottement s’écrit maintenant :
z
F a s e u
Montrer que l’équation différentielle vérifiée par s(t) du châssis est de la forme
s ' s ' s f '
où f est une fonction du temps que l’on exprimera en fonction de e et
e
L
e
s
0
x

II.2. On étudie le régime forcé permanent.
II.2.1.Expliquer la signification de cette expression.
II.2.2. En utilisant les notations complexes, exprimer l’amplitude complexe S des oscillations du
châssis en fonction de em, , ’ et ’. L’écrire sous la forme
S e jQ
jQ
m
1
12
où
'0
est la pulsation réduite, ’0 et Q étant des constantes que l’on exprimera en fonction de
’ et ’ puis de a, k, M et m.
II.2.3. En déduire l’amplitude S des oscillations en fonction de et Q. Que vaut-elle si = 1?
II.2.4. Montrer que S atteint un maximum Sm pour une pulsation réduite m que l’on déterminera en
fonction de Q, et démontrer que
S
em
mm
1
14
.
II.2.5. Calculer Q, m, Sm/em.
II.2.6. Tracer avec soin le graphe (ou l’allure du graphe si la question précédente n’a pas été faite)
donnant S/em en fonction de dans la plage 0 10.
II.2.7. Calculer la pulsation propre ’0. En déduire la distance m entre ondulations du sol provoquant
la résonance des oscillations du châssis si le véhicule roule à une vitesse V de 90km/h. Comment
réagit le châssis sur des déformations plus rapprochées passées à la même vitesse?
Problème 2. Mouvement d’un satellite artificiel. (CCP 96).
Partie 1.
On considère un satellite de masse m soumis à l'attraction gravitationnelle de la terre supposée, sphérique,
de centre O, de rayon RT, et de masse MT.
On admettra que m << MT : la terre peut donc être considérée comme fixe.
On posera : k = G MTm avec G constante de la gravitation universelle.
1.1. Donner l’expression de la force
f
s’exerçant sur le satellite.
1.2. Montrer que la trajectoire du satellite par rapport à la terre est plane. On pourra faire l'étude en
coordonnées cylindriques (r,
, z) de vecteurs unitaires correspondants a
,,
rz
u u u
avec
z
u
le
vecteur unitaire orthogonal au plan de cette trajectoire.
Démontrer la loi des aires. On notera C la constante des aires.
1.3. On note
1
ur
. Ecrire l'accélération du satellite en fonction de C, u et
2
2
du
d
.
En déduire que la trajectoire du satellite est une ellipse d'équation
1 cos
p
re
ou p et e sont
des constantes appelées respectivement paramètre et excentricité. L'axe polaire et l’axe focal
sont confondus. Donner l'expression du paramètre p en fonction de C, k et m.
1.4. On nomme périgée (P) le point de la trajectoire elliptique le plus proche de la terre et apogée
(A) le point de trajectoire elliptique le plus éloigné de la terre.
On note ( rp et vP ) et (rA et vA) la position et la vitesse du satellite respectivement à son périgée
P et à son apogée A.
1.4.1. Calculer l'excentricité e en fonction de rA et rP.
1.4.2. Calculer le rapport vP/vA en fonction de e.

Partie 2.
2.1. Déterminer l'expression de l’énergie potentielle Ep(r) du satellite en un point M de la
trajectoire tel que
r
OM ru
. On prendra Ep()= 0.
On suppose maintenant la trajectoire circulaire et uniforme de rayon ro et d'énergie mécanique
Em constante.
Etablir une relation simple entre l'énergie cinétique Ec et l'énergie potentielle Ep du satellite.
2.2. Le satellite subit des frottements sur les hautes couches de l'atmosphère ; ces frottements sont
équivalents à une force de freinage de module f =
mv2. Ce freinage est très faible, et on peut
supposer que les révolutions restent presque circulaires et que pour chacune d'elle, l'altitude h
du satellite diminue de dh avec dh << h. L'altitude h est comptée à partir de la surface de la
terre : ro = RT + h.
2.2.1. Soient dv la variation de la vitesse pour un dh donné, et la période T de révolution.
Montrer que
dv dh
T
2.2.2. Justifier l'évolution de la vitesse du satellite.
2.2.3. A partir de la variation de l’énergie mécanique du satellite sur une révolution,
exprimer
en fonction de h, dh et RT.
2.3. En remarquant que la perte relative d'énergie mécanique est faible à chaque révolution, calculer
le temps
au bout duquel le satellite s'écrasera sur la terre.
On fera l'hypothèse simplificatrice que la loi de frottement reste la même pendant toute la
chute.
2.4. La trajectoire du satellite peut être décrite dans son plan de trajectoire par l'équation en
coordonnées polaires r = ro exp -
.
2.4.1. Exprimer
en fonction de dh, RT et h.
2.4.2. Exprimer en fonction de ro et
la distance D parcourue par le satellite au cours
d'une quasi-révolution. On pourra mettre en évidence ce résultat comme la distance
d’une orbite circulaire affectée d'un terme correctif en tenant compte de l'ordre de
grandeur de
.
Problème 3. Filtre passe-bande. Décomposition en série de Fourier.
Les amplificateurs opérationnels (A.O.) utilisés sont idéaux et fonctionnent en régime linéaire.
Pour les applications numériques on prendra : C = 680 nF ; R2 = R3= 47 ; R = 6,8 k.
1. Déterminer les fonctions de transfert complexes des trois circuits alimentés par une tension
sinusoïdale de pulsation
.

Les trois circuits sont associés suivant le schéma:
2. Montrer que la fonction de transfert de l’ensemble est de la forme:
()
1 ( )
o
o
Ho
Hj jQ
Ho, Q et
o font intervenir les éléments constitutifs du circuit. Exprimer ces trois grandeurs.
3. Déterminer la bande passante
à - 3 dB
4. Déterminer le comportement asymptotique du gain en décibel GdB en fonction de x =
o
.
Déterminer les coordonnées du point d’intersection des asymptotes.
Calculer la valeur de l’ordonnée du point d’intersection des asymptotes.
Donner l’allure de la courbe GdB en fonction de X = log x où x =
/
o est la pulsation réduite
(on demande une construction soignée : 1cm 10 dB ; 2cm X = 1).
On se propose de déterminer la réponse de ce circuit à un signal carré d'amplitude E = 10 V, de fréquence
f = 1650 Hz.
La tension carrée e(t), fonction périodique peut être décomposée en série de Fourier:
e(t) = ao + a1sin
t + b1cos
t + a2sin 2
t + b2cos 2
t + . . . . + ansin n
t + bncos n
t + . . . .
On donne :
0
2( )sin
T
n
a e t n t dt
T
5. Quelle est la valeur de ao?
Que valent les coefficients bn ?
Montrer que :
211
n
nE
an
pour n 0.
Quelle est l’amplitude du fondamental (n = 1) ? ; des harmoniques 3 et 5 (n = 3, n = 5) ?
6. Caractériser le signal obtenu en sortie du filtre : nature, fréquence et amplitude.
1
/
5
100%