TP 2 pompe excentrique

1 / 7
TP : 2 - 3 C.M. / 2011-2012 / 3
ème
année / LF & SE
TP 2 et 3
Construction Mécanique 3
ième
année
Thème d’étude : Pompe à excentrique
Télécharger à partir du site http://58consmeca.free.fr et enregistrer les 4 fichiers dans un dossier
Attention ne pas lancer Catia mais lancer
SimDesigner R4 WBE CATIA V5R19.lnk
ce qui va lancer
Catia avec l’application SD activée.
Ouvrir l’assemblage pompe ex ini qui contient le bâti, l’arbre et le piston.
Démarrer Maquette numérique SD motion workbench, un nouvel onglet « SD motion » apparait
Dans l'aide de Simdesigner:
−
Structure : Eléments Finis
−
Non linéaire grande déformation
−
Motion : Etude cinématique et dynamique des mécanismes
−
Flex : motion + structure
−
Crash: crash test c'est-à-dire grandes déformations
Dans motion/reference : toutes les fonctions sont expliquées, par exemple screw joint= seulement relation
entre rotation et translation, il faut ajouter une pivot glissant
Il y a aussi des exercices à faire en autonomie
Présentation du mécanisme
Créer un mécanisme sans convertir les contraintes d’assemblage en Liaison « New mechanism »
Propriété mécanisme sans gravité : « none »
Dans l’onglet simulation « dynamic » prend en compte les forces d’inertie
Dans solver on l’utilise quand le calcul échoue
Définir le bâti comme la référence (cad le bâti !) « Add ground part »
Créer une liaison « Add constrainte », explication des différentes liaisons
−
liaisons simples (sauf screw joint = seulement relation entre rotation et translation, il faut ajouter une
pivot glissant)
−
pour les primitives voir aide « Joint Primitive » (dans le tableau les degrés de libertés supprimés sont
indiqués) :
Pontuelle = point sur plan (in plane)
Linéaire annulaire = point sur ligne (in ligne)
−
body/body : quand il y a interférence, il crée une force de contact caractérisée par une raideur et un
amortissement
−
coupler : pour coupler 2 pièces en rotation / translation : exemple courroie ou engrenage, pignon
crémaillère,
Créer une liaison pivot « Add constrainte : revolute joint » entre le bâti et l’arbre
« location » point centre du cercle en bout d’arbre et l’axe (qui doit être propre à l’arbre).
Renommer joint1 : « Pivot bati arbre y » y par rapport au repère global,

2 / 7
TP : 2 - 3 C.M. / 2011-2012 / 3
ème
année / LF & SE
Créer un mouvement « motion » vélocité constante 60tr/mn, renommer ce motion « 60tr/min »
Simuler dynamique / durée 1s « simulate »
Montrer dans le post processeur l’intérêt de renommer
Renommer resulte 1 : mvt arbre 60tr_mn no G (donner la valeur de la vitesse dans le nom)
Remarque : Renommer toutes les liaisons pour le projet construction sinon 0 !
Animer dans catia
Lancer postprocesseur adams : « plot »
Animer avec les différentes options
Cliquer Page 1 pour tracer des courbes Source : objet ou result ; dans objects constraint sont les
liaisons,
Dans source Objet/contrainte/pivot/element de force /X Qu'est ce que c'est?
Torseur des actions mécaniques pour une liaison pivot d'axe y
{X L}
{AM
1->2
}={Y 0}
{Z N} (dans le repère global de Catia)
au point?: définition de la liaison
On peut afficher la résultante des forces sur l'animation : Edit/préférence/animation/Force scale mettre 100
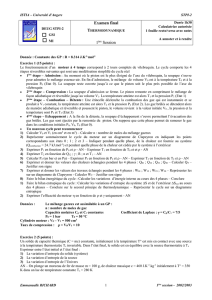
Tracer : pivot bati arbre : Fx, Fz observer le déphasage, Fmag justifier l’existence de ces efforts
Effort de balourd Fz=R cos(alpha)
Fx=R sin(alpha) Déphasé de PI/2
On peut voir les moments sur l'affichage mettre en scale 2000
Tracer : pivot bati arbre : Mx, My, Mz justifier
Changer le point de location de la pivot, lancer le calcul. Renommer le résultat du calcul mvt arbre 60trmn
no G no piston.
Visualiser les 2 calculs : pas de modification des résultantes mes changement des moments (torque) car les
résultantes sont identiques (indépendant du point) mais les moments dépendent du point M
A
=M
B
+ AB^R
Changer la valeur de la vélocité du motion de 60 à 3000 tr/mn
Renommer joint motion 1 : « mvt arbre 3000tr_mn y »
Simuler dynamique / durée 0.02s
Renommer resulte 2 : mvt arbre 3000tr_mn no G no piston
Lancer adams postprocesseur : « plot »
Cliquer Page 1 pour tracer des courbes, result, sélectionner 60 et 3000tr/mn
Tracer les résultats Fx : par défaut on a le temps en abscisse : on ne peut pas comparer les 2
directement.
On prend en « independent axis »: data puis on choisi pour l'arbre 1 theta (=rotation autour de y). Il dessine
sur 180° puis il revient On utilise le tracking pour lire sur 360. On a le résultat tout les degrés car 360
frames. Mesurer la différence d’effort explication du balourd (Comparer pivot bâti arbre : Fmag)
ω
x
z
R
alpha
r
m

3 / 7
TP : 2 - 3 C.M. / 2011-2012 / 3
ème
année / LF & SE
F = m r ω² = m r (60*2*PI/60)² ou = m r (50*60*2*PI/60)² --> Rapport de 50²=2500
Créer une liaison pivot glissante « Add constrainte : cylindrical joint » entre le bati et le piston
« location » point centre du cercle en haut du bati. Renommer joint2 : « PG bati piston z »
Liaison entre le piston et la partie excentrique Curve point impossible car il faut toujours le même point en
contact et boby body c’est trop lourd
Créer une liaison contact courbe courbe « Add constrainte : curve/curve contact » entre l’arbre (1
er
) et
le piston (2
ème
) sélection du cercle en bout d’arbre et l’arête du piston tangente.
Prendre 40 points par courbe (discrétisation) Rq courbe ouverte et l’autre fermée.
Ne pas cocher intermittent (on veut un contact bilatéral ça pousse et ça tire)
Renommer contact : « contact arbre piston z »
Simuler dynamique / durée 0.02s
Renommer resulte : mvt arbre 3000tr_mn no G contact bilat
Lancer adams postprocesseur : « plot »
Animer on voit la force de contact de l’arbre sur le piston en bout de l’arbre (comme défini) qui
change de sens. Ce n’est pas physiquement possible
Tracer : « contact arbre pistons » Fx, Fy, Fz analyser les courbes, Fz est la normale du contact
En réalité on a Fz soit toujours positif soit toujours négatif.
Modifier le « contact arbre piston z » cocher intermittent choisir les valeurs par défauts
Attention au sens de la matière (les flèches doivent être dirigées vers la matière); Dans l’onglet contact , le
contact se comporte comme les force de contact de type Hertz avec un ressort et un amortissement,
Force de contact : Fc = K (∆ l)
exponent
+ C V ; V = vitesse
• Stiffness : La raideur K ;
• Exponent (donne la non linéarité)
• Damping : amortissement C : crée une force proportionnelle à la vitesse V
• Penetration : c'est la valeur pour laquelle le coefficient C est au maximum
Pour un cas parfait :
Au moment de la pénétration problèmes numériques
Friction : les vitesses sont les valeurs pour lesquelles on prend en compte le frottement. On a toujours
µ
statique >
µ
dynamique. On prend le frottement nul (off)
Simuler dynamique / durée 0.02s
Lancer la visu sur catia pour voir le piston partir
Renommer resulte : mvt arbre 3000tr_mn no G contact inter
Lancer adams postprocesseur : « plot »
Animer : le piston tombe !
Tracer : « contact arbre piston » Fx, Fy, Fz analyser les courbes
Pour le cas unilatéral, à t=0 pas de contact, puis contact après le 1er incrément ce qui produit un choc puis
la courbe suit la forme du cas parfait (bilatéral) avec une vibration amortie,
Comparer Fx sur la liaison avec ou sans frottement que l’on retrouve sur la liaison pivot

4 / 7
TP : 2 - 3 C.M. / 2011-2012 / 3
ème
année / LF & SE
Mesurer sur le contact bilatéral la valeur mini de l’effort du piston (485N) on prend 500N au point mort
bas,
course du piston= 2* excentricité, On regarde sur la courbe de déplacement du
piston en z pour le contact bilatéral pour trouver course = 30mm
On prend un ressort entre le bas du piston et le dessus du bâti: on va dans Démarrer/Conception mécanique/
Assembly design pour mesurer la distance entre les deux --> 50mm
On revient sur Démarrer->Maquette numérique -> SD motion workbench
Il faut donc un ressort de longueur à vide 50mm + 5mm de précharge (10%) = 55mm et d'une raideur
K=F/∆l=500/(30+5)=14,286 N/mm
Créer un ressort entre le dessus du bati et le dessous du piston : « SD motion -add force : translational
spring »
1
er
composant bâti, 2eme le piston, point les cercles pour avoir une bonne direction
K = 14286N/m Lo = 55mm
Renommer la force : ressort K14286 Lo55
Simuler dynamique / durée 0.02s
Renommer resulte : mvt arbre 3000tr_mn no G contact inter K14286 Lo55
Lancer adams postprocesseur : « plot »
Animer : le piston reste en contact OK
Tracer : « contact arbre piston » en bilatéral, unilateral sans ressort et unilatéral avec ressort Fz analyser les
courbes : Fz tjs négatif, choc puis oscillations amorties (régime transitoire) .
Comment obtenir le couple moteur pour comprimer le piston ?
Tracer : « mvt arbre 3000tr_mn y» Ty : ça correspond au couple moteur nécessaire pour avoir le
mvt de l’arbre à la vitesse constante de 3000tr/mn car on a imposer un mouvement
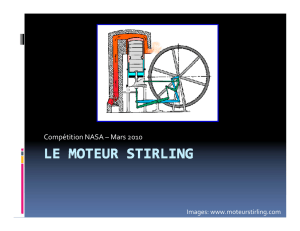
On ajoute la pression du fluide, pression de refoulement Pr = 100 bar
Pression admission : Pa = - 0,5 bar (max -1bar)
Add Force :
PMH
PMB
t
Pabsolue
PMH PMB
0,01s
0,02s
Pr
F= 100*10
5
*PI*(10*10
-
3
)² = 3140N
Fas= -0,5*10
5
*PI*(10*10
-
3
)²=-15N

5 / 7
TP : 2 - 3 C.M. / 2011-2012 / 3
ème
année / LF & SE
−
Action only
−
action réaction Regarder dans l'aide pour voir les différences
On prend Action Only car il n'y a pas de réaction sur le système
- appliquer sur le piston
- référence bâti
- location : centre du cercle inférieur du piston
- direction : axe piston ou bati
On voit le trièdre et on peut l'orienter
Force = 3140N
Il y a deux possibilités : soit on fait le calcul sur le refoulement avec Fconst=3140N puis on fait le calcul en
admission avec Fconst=-15N
Ou bien on fait une Spline (cubic) et on définit les points :
t F
0 3140
0,005 3140
0,009 3140
0,01 0
0,011 -15
0,015 -15
0,02 -15
Renommer la force : Force_huile
Lancer la simulation
Renommer le résultat: mvt arbre 3000tr_min y no G contact unilat k14286 Lo55 FH cubic
On lance l'animation, Si le piston part n'importe où, c'est qu'il y a un défaut d'orientation de la force
Y a t il décollement du piston dû à la force d'aspiration? On regarde l'effort en z du contact arbre-piston : si
=0 c'est qu'il y a décollement,
On peut tracer la courbe de la force du fluide : il y a des oscillations et il faut plein de point pour bien
représenter--> On essaye avec AKIMA,
Nouveau calcul et renommer les résultats: mvt arbre 3000tr_min y no G contact unilat k14286 Lo55 FH
akima
Comparer les résultats des forces du fluide avec cubic et Akima : Akima représente mieux la force
On trace la courbe Fz du contact_abre_piston en akima --> on voit une force nulle au moment du
décollement du piston dû à l'aspiration. Il y a 2 solutions : augmenter la raideur du piston ou modifier la
précharge,
Pour connaître la force du ressort pour ne pas avoir de décollement, on relance un calcul avec un contact
bilatéral, Renommer le résultat: mvt arbre 3000tr_min y no G contact bilat k14286 Lo55 FH akima,
On trace la force Fz au niveau du contact : la force est toujours>0 !!! --> Est ce illogique? Non car avec le
contact bilatéral il n'y a pas de choc au départ.
Mesure du couple moteur : Tracer le moment Ty au niveau de mvt_arbre : au départ pour le refoulement le
moteur qui fournit de l'énergie puis ça change de signe car c'est le piston qui founit l'énergie (restitution de
l'énergie du ressort). Pour avoir la puissance, on multiplie le couple par la vitesse de l'arbre (qui est
constante par définition du mouvement d'entrée) on la retrouve en choisissant l'arbre et WY,
 6
7
6
7
1
/
7
100%