Courbes paramétrées - Le site de la Sup 1

Chapitre 7
Courbes paramétrées
Objectifs
– Définition d’une courbe paramétrée et du vocabulaire qui s’y rattache. Lien avec la cinématique.
– Plan d’étude d’une courbe paramétrée. Étude locale au voisinage d’un point. Étude des branches infinies.
– Définition et étude des courbes polaires.
– Étude des coniques.
Sommaire
I) Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1) Fonctions vectorielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2) Définition d’une courbe paramétrée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
II) Étude locale en un point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1) Tangente en un point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2) Branches infinies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
III) Courbes paramétrées en polaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1) Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2) Cas particulier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3) Plan d’étude d’une courbe polaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
IV) Les coniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1) Définition monofocale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2) Le cas de la parabole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3) Le cas de l’ellipse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4) Le cas de l’hyperbole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5) Définition bifocale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
6) Définition algébrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
V) Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
P
désigne un plan affine muni d’un repère [éventuellement orthonormé direct]
R
= (
O,−→
ı,−→
), on
note
−→
P
=
{a−→
ı
+
b−→
/ a,b∈R}
l’ensemble des vecteurs du plan. Dans tout le chapitre
I
désigne un
intervalle de R(non vide et non réduit à un point).
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 1

Généralités Chapitre 7 : Courbes paramétrées
I) Généralités
1) Fonctions vectorielles
DÉFINITION 7.1
Une fonction vectorielle est une fonction
−→
f:I→−→
P
. Pour
t∈R
on note (
x
(
t
)
,y
(
t
)) les coordonnées de
−→
f
(
t
)dans
la base (
−→
ı,−→
), on a donc
−→
f
(
t
) =
x
(
t
)
−→
ı
+
y
(
t
)
−→
. On
remarquera que xet ysont deux fonctions de Idans R.−→
ı
−→
x(t)
y(t)
O
−→
f(t)
Remarque
: Le repère étant choisi, se donner une fonction vectorielle revient à se donner deux fonctions réelles. Si le
repère est orthonormé direct, on peut utiliser la notion d’affixe complexe.
DÉFINITION 7.2
Soit
−→
f:I→−→
P
une fonction vectorielle, soit
−→
`∈−→
P
et
soit
t0
un élément de
I
(ou une borne de
I
), on dit que
−→
f
admet pour limite le vecteur −→
`en t0lorsque :
lim
t→t0k−→
f(t)−−→
`k=0
Notation :lim
t→t0
−→
f(t) = −→
`ou −→
f(t)−→
t→t0
−→
`.−→
ıa
−→
x(t)
a
y(t)
b
O
−→
f(t)
−→
`
−→
f(t)−−→
`
Caractérisation de la limite avec les fonctions coordonnées :
THÉORÈME 7.1
ÐÐÐÐÐÐÐ
Si −→
f(t) = x(t)−→
ı+y(t)−→
et si −→
`=a−→
ı+b−→
alors : lim
t→t0
−→
f(t) = −→
`⇐⇒
x(t)−→
t→t0
a
y(t)−→
t→t0
b.
Preuve
: Supposons le repère orthonormé, alors
k−→
f
(
t
)
−−→
`k
=
p[x(t)−a]2+ [ y(t)−b]2
ce qui donne l’implication
de droite à gauche. D’autre part, on a :
|x
(
t
)
−a|¶k−→
f
(
t
)
−−→
`k
et
|y
(
t
)
−b|¶k−→
f
(
t
)
−−→
`k
ce qui donne la
réciproque.
Par analogie avec les fonctions réelles, on définit les notions de continuité puis de dérivabilité.
DÉFINITION 7.3
Soit
−→
f
:
I→−→
P
une fonction vectorielle et
t0
un élément de
I
, on dit que
−→
f
est continue en
t0
lorsque lim
t→t0
−→
f(t) = −→
f(t0).
Remarque
: si
−→
f
(
t
) =
x
(
t
)
−→
ı
+
y
(
t
)
−→
alors il découle du théorème précédent que
−→
f
est continue en
t0
ssi les fonctions xet ysont continues en t0.
DÉFINITION 7.4
Soit
−→
f
:
I→−→
P
une fonction vectorielle et
t0
un élément de
I
, on dit que
−→
f
est dérivable en
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 2

Généralités Chapitre 7 : Courbes paramétrées
t0
lorsqu’il existe un vecteur
−→
`
tel que
lim
t→t0
1
t−t0
[
−→
f
(
t
)
−−→
f
(
t0
)] =
−→
`
, auquel cas on écrit
−→
f0(t0) = −→
`.
Remarque
: si
−→
f
(
t
) =
x
(
t
)
−→
ı
+
y
(
t
)
−→
alors il découle du théorème précédent que
−→
f
est dérivable en
t0
ssi les fonctions xet ysont dérivables en t0auquel cas on a −→
f0(t0) = x0(t0)−→
ı+y0(t0)−→
.
On peut alors vérifier que l’on retrouve les règles usuelles de dérivation : dérivée d’une somme, de
λ·−→
f, de −→
f◦g, auxquelles s’ajoutent de nouvelles règles :
THÉORÈME 7.2
ÐÐÐÐÐÐÐÐÐÐÐÐÐ
Soient −→
fet −→
gdeux fonctions vectorielles dérivables sur I,ona:
– dérivée du produit scalaire : −→
f·−→
g0=−→
f0·−→
g+−→
f·−→
g0.
– dérivée du déterminant : det(−→
f,−→
g)0=det(−→
f0,−→
g) + det(−→
f,−→
g0).
– dérivée de la norme : si −→
fne s’annule pas, k−→
fk0=−→
f0·−→
f
k−→
fk.
Preuve: En exercice.
Pour terminer cette partie nous allons définir la notion de classe d’une fonction :
DÉFINITION 7.5
Une fonction vectorielle
−→
f
:
I→−→
P
est dite de classe
Ck
sur l’intervalle
I
lorsqu’elle est
k
fois
dérivable sur Iet que sa dérivée k-ième (notée −→
f(k)) est continue sur I.
Si
−→
f
(
t
) =
x
(
t
)
−→
ı
+
y
(
t
)
−→
alors la fonction
−→
f
est de classe
Ck
sur
I
ssi les fonctions
x
et
y
sont
elles-mêmes de classe Cksur I, si c’est le cas, alors on a −→
f(k)(t) = x(k)(t)−→
ı+y(k)(t)−→
.
2) Définition d’une courbe paramétrée
DÉFINITION 7.6
Une courbe paramétrée (ou arc paramétré)
C
, de classe
Ck
est la donnée d’un triplet
C
= (
I,−→
f,
Γ),
où
I
est un intervalle de
R
,
−→
f
une fonction vectorielle de classe
Ck
sur
I
, et Γ =
{M
(
t
)
/t∈
Iet −→
f
(
t
) =
−−−−→
OM(t)}
. Le couple (
I,−→
f
)est appelé
paramétrage
de la courbe, et Γest appelé le
support de la courbe [ou ensemble des points de la courbe].
Exemples:
–
Un arc paramétré est souvent donné par un paramétrage, exemple : soit
C
la courbe paramétrée par
x
(
t
) = 1+
t2
et y(t) = 1−t2+t,t∈R.
–
Une courbe cartésienne d’équation
y
=
g
(
x
)
,x∈I
est un cas particulier de courbe paramétrée, on peut prendre
comme paramétrage : x(t) = tet y(t) = g(t),t∈I.
Interprétation cinématique :
– La courbe C= (I,−→
f,Γ) est appelée mouvement, et le support Γest appelé trajectoire.
– Le vecteur −→
f(t) = −−−−→
OM(t) = x(t)−→
ı+y(t)−→
est appelé vecteur position.
–
Le vecteur
−→
f0
(
t
) =
d(−−−−→
OM(t) )
d t
=
x0
(
t
)
−→
ı
+
y0
(
t
)
−→
=
−→
v
(
t
)est appelé
vecteur vitesse
. Lorsque
−→
v
(
t
)
6
=0, on dit que le point
M
(
t
)est
régulier
, sinon on dit qu’il est
stationnaire
. Lorsque tous les
points sont réguliers, on dit que la courbe Cest régulière.
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 3

Étude locale en un point Chapitre 7 : Courbes paramétrées
–
Le vecteur
−→
f00
(
t
) =
d2(−−−−→
OM(t) )
d t2
=
x00
(
t
)
−→
ı
+
y00
(
t
)
−→
=
−→
a
(
t
)est appelé
vecteur accélération
.
Lorsque
−→
v
(
t
)et
−→
a
(
t
)sont non colinéaires, (i.e.
det
(
−→
v
(
t
)
,−→
a
(
t
))
6
=0), on dit que le point
M
(
t
)est
birégulier. Lorsque tous les points sont biréguliers, on dit que la courbe Cest birégulière.
Exemple
: Montrer que la courbe paramétrée par :
x
(
t
) = 1+
t2
et
y
(
t
) = 1
−t2
+
t
, est birégulière. Étudier les
variations de xet de y, étudier le rapport y
xau voisinage de ∞, et donner l’allure de la courbe.
II) Étude locale en un point
1) Tangente en un point
Soit
C
= (
I,−→
f,
Γ) une courbe de classe
Cn
(
n¾
1), soit
M
(
t0
)un point régulier et soit
h∈R∗
tel que
t0+h∈I, alors le vecteur :
1
h−−−−−−−−−−−→
M(t0)M(t0+h) = x(t0+h)−x(t0)
h−→
ı+y(t0+h)−y(t0)
h−→
est un vecteur directeur de la droite (
M
(
t0
)
M
(
t0
+
h
)), donc lorsque
h
tend vers 0, cette droite « tend » vers
la droite qui passe par M(t0)et dirigée par le vecteur −→
f0(t0).
DÉFINITION 7.7
Si
M
(
t0
)est un point
régulier
, la droite qui passe par
M
(
t0
)et dirigée par
−→
f0
(
t0
)[le vecteur vitesse]
est appelée tangente à la courbe au point M(t0).
En un point stationnaire
M
(
t0
), si le quotient
y(t)−y(t0)
x(t)−x(t0)
admet une limite en
t0
, alors celle-ci est le
coefficient directeur de la tangente au point
M
(
t0
). Cela revient aussi à étudier la limite en
t0
du rapport
y0(t)
x0(t)(si celui-ci existe).
Exemple: Étudier la courbe paramétrée par : x(t) = cos(t)et y(t) = sin(t)[1+cos(t).
Réponse : on peut se placer dans l’intervalle [
−π
;
π
]car la fonction
x
(
t
)est paire et la fonction
y
(
t
)est impaire,
la courbe est symétrique par rapport à l’axe
Ox
, et on peut réduire l’étude à l’intervalle [0;
π
]. Le tableau des
variations est :
t0π
3π
x0
x
y0
y
0−0
2+0−0
1
−1
0
3p3
4
0
0 1−1
0
1
−1
Le point M(π)est stationnaire, y(t)−y(π)
x(t)−x(π)=sin(t)−→
t→π0 on a donc une tangente horizontale en M(π).
2) Branches infinies
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 4

Étude locale en un point Chapitre 7 : Courbes paramétrées
DÉFINITION 7.8
Soit
t0
un élément de
I
ou une borne de
I
, on dit que la courbe
C
= (
I,−→
f,
Γ) admet une branche
infinie en t0lorsque lim
t→t0
x(t) = ∞ou lim
t→t0
y(t) = ∞.
Étude des branches infinies :
–
Si
lim
t→t0
x
(
t
) =
∞
et
lim
t→t0
y
(
t
) =
y0
, alors on dit qu’il y a une asymptote horizontale d’équation
y
=
y0
.
– Si lim
t→t0
x(t) = x0et lim
t→t0
y(t) = ∞, alors on dit qu’il y a une asymptote verticale d’équation x=x0.
– Si lim
t→t0
x(t) = ∞et lim
t→t0
y(t) = ∞, alors on étudie la limite en t0du rapport y(t)
x(t):
– Si lim
t→t0
y(t)
x(t)=0, on dit qu’il y a une branche parabolique dans la direction de l’axe Ox.
– Si lim
t→t0
y(t)
x(t)=∞, on dit qu’il y a une branche parabolique dans la direction de l’axe O y.
– Si lim
t→t0
y(t)
x(t)=a∈R∗, alors on étudie la limite de y(t)−ax(t)en t0:
– Si lim
t→t0
y(t)−ax(t) = b, alors on dit qu’il y a une asymptote d’équation y=ax +b.
–
Si
lim
t→t0
y
(
t
)
−ax
(
t
) =
∞
, alors on dit qu’il y a une branche parabolique dans la direction
asymptotique y=ax.
Exemples:
– Étudier les branches infinies de la courbe paramétrée par x(t) = t3
t2−9et y(t) = t(t−2)
t−3.
Réponse : On a I=] −∞;−3[∪]−3; 3[∪]3;+∞[.
∗En t0=−3 : lim
→3x(t) = ∞et lim
t→3y(t) = −5/2, il y a donc une asymptote horizontale d’équation y=−5/2.
∗
En
t0
=3 :
y(t)
x(t)
=
t(t−2)(t+3)
t3−→
3
2
3
puis on calcule
y
(
t
)
−2
3x
(
t
) =
t(t+6)
3(t+3)−→
3
3
2
il y a donc une asymptote
d’équation
y
+
2
3x
=
3
2
.
y
(
t
)
−2
3x
(
t
)
−3
2
=
(t−3)(2t+9)
6(t+3)
donc la courbe est au-dessus de l’asymptote au voisinage
à droite de 3, et en-dessous au voisinage à gauche de 3.
En
t0
=
±∞
: on a
y(t)
x(t)−→
∞
1 et
y
(
t
)
−x
(
t
) =
t2−6t
t2−9−→
∞
1, on a donc une asymptote d’équation
y
=
x
+1.
D’autre part,
y
(
t
)
−x
(
t
)
−
1=
9−6t
t2−9
, donc la courbe est au-dessus de l’asymptote au voisinage de
−∞
et
en-dessous au voisinage de +∞.
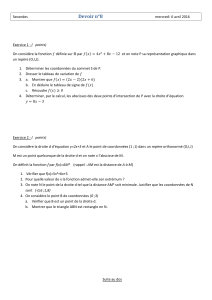
– Étudier la courbe paramétrée par : x(t) = t
ln(t)et y(t) = t2
t−1.
t012e+∞
x0
x
y0
y
− − 0+
− − 0+
0
−∞
+∞
e
+∞
0
−∞
+∞
4
+∞0 1 2 3 4 5 6
−1−2−3
−4
0
1
2
3
4
5
6
−1
−2
−3
−4
∗En +∞:y(t)
x(t)−→ +∞: branche parabolique de direction O y.
∗En 0 : y0(t)
x0(t)−→ 0 : on arrive à l’origine horizontalement.
∗En 1 : y(t)
x(t)−→ 1 et y(t)−x(t)−→ 1
2: asymptote d’équation y=x+1
2.
Dans la suite du chapitre, R= (O,−→
ı,−→
)désigne un repère orthonormé direct.
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 5
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%