Compte rendu TP C1

Toraille Nicolas TS3

Page 2 sur 22
1. Rappel des formules du pendule pesant (ou pendule
simple).
Période :
g
l
T
2
, si θmax est petit.
)
16
²
1(2 max
g
l
T
, si θmax est grand.
(θmax est exprimé en radians)
Equation horaire :
)
2
sin(
max
Tt
, si θmax est petit.
Energie cinétique :
)²²(
2
1dt
d
mlEK
Energie potentielle :
)cos1(
mglEp
avec EP = 0 pour θ = 0, c’est-à-dire à l’équilibre.
Energie mécanique :
PKM EEE

Page 3 sur 22
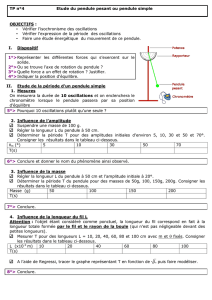
2. Influence de m, l, θmax sur la période T d’un pendule
simple : mise en évidence expérimentale.
Schéma :
Fil
longueur l
Masselote
Masse m
Support
Table
Schéma du montage utilisé
(de profil)
Schéma du montage utilisé
(de face)

Page 4 sur 22
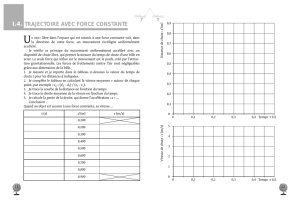
2.1 Relation entre T et m.
On prend θmax<10° et l = constante (environ 60cm).
On fait varier la masse m, et on mesure à chaque fois 10 périodes de T. On complète le
tableau suivant :
m (g)
20
40
60
80
100
T (s)
12,96
12,98
13,02
13,03
13,06
On trace T = f(m) à l’aide du logiciel Regressi.
On peut en conclure que la masse m n’a aucune incidence sur la longueur de la période.
2.2 Relation entre T et l.
On prend m = 50g et θmax<10°. On fait varier l, et on mesure à chaque fois 10 périodes T. On
complète le tableau suivant :
l (cm)
20
40
60
80
100
T (s)
0,82
1,15
1,41
1,63
1,82
T² (s²)
0,6724
1,322
1,988
2,657
3,312

Page 5 sur 22
On trace T = f(l) à l’aide du logiciel Regressi :
On modélise à l’aide du modèle « puissance ».
On peut donc essayer de tracer la courbe T² = f(l) car la modélisation « puissance » est très
proche des valeurs mesurées :
On remarque que T² est proportionnelle à l.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%