TD M3 : Oscillateurs et mouvements circulaires - e

Mécanique TD-M3-oscillateurs-et-mouvements-circulaires
TD M3 : Oscillateurs et
mouvements circulaires
Oscillateurs sans frottement
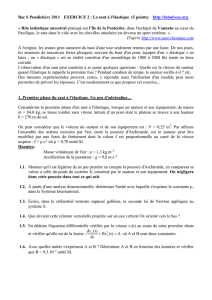
Exercice 1 - Deux ressorts en équilibre *
Considérons deux ressorts identiques, de même constante de
raideur
k
= 20
N.m−1
, de longueur à vide
`0
= 20
cm
montés
comme l’indique la figure ci-contre et soutenant deux points
matériels
M1
et
M2
de masse
m1
= 100 g et
m2
= 150 g. On
prendra le champ de pesanteur g= 10 N.kg−1.
1.
En étudiant l’équilibre de M
2
, calculez la longueur
`2
du deuxième ressort.
2.
En étudiant l’équilibre de M
1
, calculez la longueur
`1
du premier ressort.
−→
g`1
`2
M1
M2
Figure 1 – deux ressorts en série
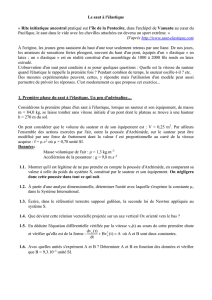
Exercice 2 - Le saut à l’élastique ***
Un sauteur à l’élastique, assimilable à un point matériel
M de masse
m
= 70
kg
, tombe depuis un pont (en A) sans
vitesse initiale, avec un élastique fixé aux pieds. Pendant
les 20 premiers mètres de chute, l’élastique n’exerce aucune
action ; le sauteur est donc en chute libre.
À partir du point B, l’élastique se tend : son action est
alors modélisée par une force élastique de constante de
raideur
k
= 120
N.m−1
, la longueur à vide de l’élastique
vaut
`0
= 20 m. On supposera le référentiel
Rg
(A
,−→
ux,−→
uy,−→
uz
)
galiléen.
•G
−→
uz
A
B
C
H
`0= 20 m
−→
g
Sol
Figure 2 – Saut à l’élastique
1. Exprimer et calculer la vitesse du sauteur au point B.
2.
Quelle est l’équation du mouvement à partir de B (on pourra poser l’origine des axes en B).
3. En résolvant l’équation différentielle obtenue, trouver la hauteur totale de chute H.
Indication
On utilisera la formule cos2+sin2= 1.
4.
Calculer l’accélération du sauteur lorsqu’il commence à remonter et la transformer en nombre
de g.
1
Mécanique TD-M3-oscillateurs-et-mouvements-circulaires
Mouvements circulaires
Un peu de cours : le mouvement circulaire et circulaire uniforme
Lors d’un mouvement circulaire, le point M se déplace sur un cercle de rayon
R
constant.
On a : −−→
OM =R−→
ur(13)
L’expression de la vitesse est simplifiée par rapport à celle d’un mouvement quelconque :
−→
v=R˙
θ−→
uθcar ˙
R= 0 (14)
En faisant intervenir la vitesse angulaire
ω
=
˙
θ
, on peut écrire la norme de la vitesse
v=R ω .
De la même manière l’expression de l’accélération se résume à :
−→
a=−R˙
θ2−→
ur+R¨
θ−→
uθ(15)
Cas du mouvement circulaire uniforme
Dans ce cas, la vitesse linéaire (
v
) et la vitesse angulaire
ω
=
˙
θ
sont constantes. Donc
¨
θ= 0. L’expression de l’accélération se simplifie :
−→
a=−R˙
θ2−→
ur(16)
Malgré une vitesse constante, l’accélération n’est pas nulle car le vecteur vitesse change
de direction à chaque instant.
On peut remarquer que pour un mouvement circulaire uniforme, le
vecteur vitesse et
le vecteur accélération sont orthogonaux et que l’on a :
a=v2
R(17)
Exercice 3 - Roue en rotation **
On met en rotation une roue de rayon
R
= 35
cm
, autour de son axe. La roue fait alors 1 tour
par seconde et le mouvement est supposé uniforme. On considère un point B situé à la périphérie
de la roue.
1. Calculer la vitesse du point B.
2. Calculer l’accélération du point B.
2

Mécanique TD-M3-oscillateurs-et-mouvements-circulaires
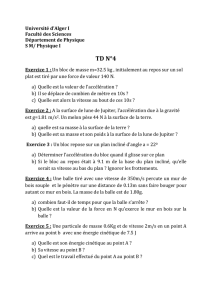
Exercice 4 - Trajectoire circulaire **
Un homme fait tourner une balle (assimilée à un
point matériel M de masse
m
) au bout d’un fil
inextensible sans masse de longueur
OM
=
R
. La
trajectoire de la balle est un cercle de centre O et de
rayon
R
dans la mesure où sa vitesse est suffisante.
La main de l’homme est considérée comme fixe, le
référentiel (R,−→
ex,−→
ey,−→
ez) est considéré galiléen.
Dans cet exercice, tout frottement est négligeable.
O
(1)
−→
ez
−→
ex
θ
M
Figure 3 – Mouvement circulaire d’une balle
suspendue à un fil
1. Déterminer l’équation différentielle du mouvement de la balle.
2. Déterminer l’expression de la tension du fil.
3.
Déterminer l’expression de la vitesse minimale
vmin
avec laquelle la balle doit passer en (1)
pour qu’elle continue son parcours sur la trajectoire circulaire de rayon R.
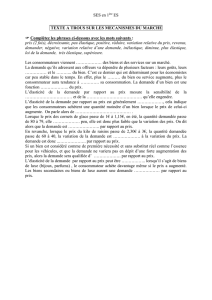
Exercice 5 - Descente abrupte d’un véhicule **
Une voiture, assimilée à un point matériel M de
masse
m
= 1000
kg
amorce une descente en A à
la vitesse
v0
= 125
km.h−1
. On assimile le début
de la descente de A à B à un arc de cercle, de
centre O, de rayon
R
= 130 m et d’angle
α
=
15
◦
. On suppose que durant la descente la force
motrice de la voiture est tangente à la route et
de valeur algébrique F constante (positive pour
une accélération et négative pour un freinage). On
néglige les frottements sur la route.
O
A
B
M
α
Figure 4 – Descente abrupte d’un véhicule
1.
Sur le schéma, représenter au niveau du point M les vecteurs de la base polaire, indiquer les
coordonnées Ret θavec lesquelles on repèrera le point M.
2. Déterminer les équations du mouvement en projection dans la base polaire.
3. Après avoir multiplié par ˙
θl’équation selon −→
uθ, l’intégrer.
4. Déterminer l’expression de la réaction normale Nen fonction de R,θ,g,m,v0et F.
5.
Calculer l’angle
θd
pour lequel la voiture quitterait la route, dans le cas où le conducteur
coupe le moteur en A. Conclusion.
6.
Faut-il accélérer ou freiner ? pour répondre à cette question, calculer la valeur de
F
pour
que la voiture arrive en B sans décoller (soit pour θd=α).
3
Mécanique TD-M3-oscillateurs-et-mouvements-circulaires
Oscillateurs avec frottements
Exercice 6 - Ressort et force constante ***
Un point M de masse
m
est accrochée à un ressort horizontal de raideur
k
et de longueur à vide
`0
. Le point M est astreint à un déplacement horizontal sur l’axe Ox. Un dispositif de freinage
exerce une force de frottement visqueux
−→
f
=
−α−→
v
où
−→
v
est la vitesse de M. À partir du repos
(x=`0), M est soumis à une force constante −→
F.
1. Établir l’équation différentielle du mouvement.
2.
Quelle est la condition pour avoir une solution pseudo-périodique ? Déterminer alors la
solution x(t).
3. Déterminer xau bout d’une pseudo-période.
4
1
/
2
100%