_5_ Cas particulier d`un point attaché à _R`_

VAUDON Patrick : essai sur une extension de la transformation de LORENTZ aux référentiels accélérés
29
29
V
Cas particulier d’une masse ponctuelle
au repos suivant l’axe O’x’ du référentiel
(R’)
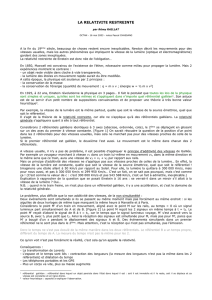
Nous supposerons que le point matériel, ou la masse, est portée par le référentiel (R’),
ou en d’autres termes qu’elle est au repos, par rapport à l’axe O’x’, dans le référentiel (R’)
(Figure V-1). Cela induit des conséquences dans la référentiel (R) que nous allons examiner, et
dont nous allons vérifier la cohérence lorsque cela semble possible.
(R ) (R’)
y y’
X
0
(t)
Masse au repos
O O’ dans (R’ ) x x’
Figure V-1 : Masse au repos suivant l’axe des x dans le référentiel (R’).
Le référentiel (R’) évolue par rapport au référentiel (R) suivant l’axe des x avec une
vitesse relative v, et une accélération relative a. Ces deux grandeurs sont imposés et cela induit
une différence par rapport à la situation examinée au chapitre précédent.
Dans le référentiel (R’), une masse ponctuelle sera au repos suivant l’axe O’x’ si elle
respecte les deux conditions :
0
'
dt
'dx =
(V-1)
0
'dt 'xd
2
2
= (V-2)

VAUDON Patrick : essai sur une extension de la transformation de LORENTZ aux référentiels accélérés
30
30
Comme au chapitre précédent, nous allons injecter ces deux conditions dans les
expressions générales des transformations et examiner, chaque fois que cela semble possible, la
cohérence des relations obtenues dans cette situation particulière.
I – La transformation des vitesses
I-1 Transformation des vitesses suivant Ox
La relation de transformation générale est identique à celle de la relativité restreinte :
dt
dx
c
v
1
v
dt
dx
'dt'dx
2
−
−
= (V-3)
Dans les conditions exprimées en (V-1) et (V-2), on obtient :
v
dt
dx =
(V-4)
Vu du référentiel (R), la masse est animée, suivant Ox, d’une vitesse identique à celle
du référentiel (R’), ce qui est cohérent, puisqu’elle est portée par l’axe O’y’.
I-2 Transformation des vitesses suivant Oy
La relation de transformation générale est identique à celle de la relativité restreinte :
dt
dx
c
v
1c
v
1
dt
dy
'dt'dy
2
2
2
−
−
=
(V-5)
On obtient après avoir posé dx/dt = v :
2
2
c
v
1
dt
dy
'dt'dy
−
=
(V-6)
Cette relation apparaît comme la relation réciproque de celle qui a été donnée lorsque le
point matériel vu de (R’) était au repos dans (R) (relation IV-6).
II – La transformation des accélérations
II-1 Transformation des accélérations suivant Ox
La relation de transformation générale est rappelée pour mémoire :

VAUDON Patrick : essai sur une extension de la transformation de LORENTZ aux référentiels accélérés
31
31
()
(
)
3
2
2
2
22
2
2
2
3
2
3
2
2
22
dt
dx
c
v
1
c
v
1v
dt
dx
dt
dx
c
a
dt
dx
c
v
1
c
v
1
a
dt
dx
c
v
1
c
v
1
²dtxd
'²dt 'xd
−
−−
+
−
−
−
−
−
=(V-7)
Le dernier terme s’annule car dx/dt = v. En effectuant cette substitution également dans
les deux premiers termes, on obtient en imposant d²x’/dt’² = 0 :
a
²
dt
xd
2
= (V-8)
Le point matériel étant au repos par rapport à l’axe O’x’ du référentiel (R’), il est
cohérent de trouver son accélération identique à l’accélération relative de (R’) par rapport à
(R). Contrairement à la situation analogue du chapitre IV, l’accélération du point matériel ne
tend pas vers 0 lorsque la vitesse relative augmente puisque en imposant l’accélération relative
a et la vitesse relative v, on impose également l’accélération du point matériel et sa vitesse par
rapport au référentiel (R).
II-2 Transformation des accélérations suivant Oy
La relation de transformation générale est la suivante :
(
)
3
2
23
2
2
2
2
2
22
2
2
2
22
dt
dx
c
v
1
v
dt
dx
c
a
dt
dy
dt
dx
c
v
1
c
v
1
dt
dy
dtxd
c
v
dt
dx
c
v
1
c
v
1
²dtyd
'²dt 'yd
−
−
+
−
−
+
−
−
=
(V-9)
Dans les conditions exprimées en (V-4) et (V-8), on obtient :
2
2
2
2
2
2
22
c
v
1
1
dt
dy
a
c
v
c
v
1
1
²dtyd
'²dt 'yd
−
+
−
= (V-10)
Comme dans le chapitre précédent, même si le point matériel n’est pas accéléré
suivant Oy dans le référentiel (R) (d²y/dt² = 0), il peut apparaître une accélération suivant cette
direction dans le référentiel (R’), à condition que la vitesse dy/dt soit non nulle. Ce résultat ne
peut être déduit ni de la mécanique classique, ni de la relativité restreinte.
III – La transformation des masses
La relation de transformation est déduite de la relativité restreinte :

VAUDON Patrick : essai sur une extension de la transformation de LORENTZ aux référentiels accélérés
32
32
−
−
=dt
dx
c
v
1
c
v
1
m
'm
2
2
2
(V-11)
En introduisant la condition exprimée en (V-4), on obtient :
2
2
c
v
1m'm −= (V-12)
Cette relation apparaît comme la relation réciproque de celle qui a été donnée lorsque la
masse vue de (R’) était au repos dans (R) (relation VI-13).
IV – La transformation de la variation temporelle de la masse
La relation de transformation complète se présente sous la forme suivante :
(
)
−
−
−
−
−
−=
2
2
2
2
2
2
2
2
c
v
1
dt
dx
c
v
1
v
dt
dx
c
a
m
dt
dx
c
v
1dtxd
c
v
m
dt
dm
'dt 'dm (V-13)
Dans les conditions exprimées en (V-4) et (V-8), on obtient :
2
22
c
v
1v
c
a
m
dt
dm
'dt 'dm −
−=
(V-14)
On s’attend physiquement à ce que dm’ /dt’ = 0 puisque la masse est au repos dans le
référentiel (R’). Il convient alors d’évaluer dm/ dt afin de vérifier ce résultat.
De l’expression de la masse dans le référentiel (R) :
2
2
0
c
v
1
m
m−
=
(V-15)
on déduit par dérivation par rapport au temps :
2
223
2
2
2
0
3
2
2
2
0
c
v
1v
c
ma
c
v
1
v
cam
dt
dv
c
v
12
c
v
2
m
dt
dm −
=
−
=
−
= (V-16)
En rapprochant cette dernière expression de la relation (V-14), on peut conclure que
dm’/dt’ = 0, conformément au résultat attendu pour une masse au repos dans (R’).
V – La transformation des forces

VAUDON Patrick : essai sur une extension de la transformation de LORENTZ aux référentiels accélérés
33
33
V-1 Transformation des forces suivant Ox
La transformation générale entre deux référentiels en mouvement relatif accéléré est
rappelée ci-dessous :
( )
−
−
−
+−
−
=
2
2
2
2
ex
2
x
c
v
1
dt
dx
c
v
1
v
dt
dx
c
mav
FF
dt
dx
c
v
11
'F
(V-17)
avec
( )
dt
dm
vmamv
dt
d
F
e
+==
(V-18)
En introduisant la condition exprimée en (V-4), on obtient :
(
)
2
2ex
x
c
v
1
FF
'F −
−
=
(V-19)
Nous sommes dans une situation où dx/dt = v et d²x/dt² = a, ce qui implique F
x
= F
e
. On
en déduit que F
x
’ = 0 conformément au résultat attendu pour une masse au repos suivant l’axe
O’x’ dans (R’).
V-2 Transformation des forces suivant Oy
De la transformation générale :
dt
dx
c
v
1c
v
1
F'F
2
2
2
yy
−
−
=
(V-20)
nous déduisons de la condition exprimée en (V-4) :
2
2
y
y
c
v
1
F
'F −
=
(V-21)
soit la transformation réciproque de celle qui a été obtenue au chapitre précédent.
1
/
5
100%