9,81 E m h = ⋅ ⋅

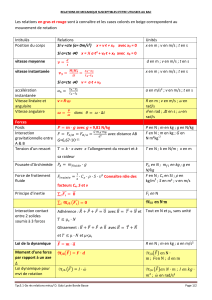
Dynamique
Trajectoire
Circulaire Rectiligne
Loi de Newton Loi de Newton
I = F t
Q = m V
F = m a
⋅
⋅
⋅
∆
∆
W = F s
⋅
Travail-Energie
Travail-Energie
Puissance Puissance
I = Mt
⋅ ∆
Q = J
⋅ ∆
ω
M
= J
⋅
α
W =
M
⋅ ∆
θ
P = W
t t
P =
constante
∆
∆
∆
=⋅
⋅
M
θ
ω
P = W
t
F s
t
P = F V
constante
∆
∆
∆
=⋅
⋅
η
=P
P
utile
absorbée
η
=Travail
Energie
W
E
=
Rendement
Rendement
2
J
E
2
c
ω
⋅
=
M
9,81
pot
E m h= ⋅ ⋅
2
2
cin
m V
E⋅
=

Cinématique – Dynamique
Symbole – Unité
Symbole Unité Grandeur
So m Position initiale
S m Position
ΔS m Espace parcouru
Δt s Durée
V m/s Vitesse
V0 m/s Vitesse initiale
ΔV m/s Variation de vitesse
a m/s2 accélération
m kg masse
I Ns Impulsion
Q Kg m/s Quantité de mouvement
F N Force
W Joule Travail - Energie
Ep Joule Energie potentielle
Ec Joule Energie cinétique
P Watt Puissance
n t/s Fréquence de rotation
Vc m/s Vitesse circonférentielle
ω rad/s Vitesse angulaire
θ0 rad Position angulaire initiale
θ rad Position angulaire finale
Δθ rad Angle balayé
ω0 rad/s Vitesse angulaire initiale
α rad/s2 Accélération angulaire
M Nm Moment de force
I Ns Impulsion
J Kgm2 Moment d’inertie
1
/
2
100%