TS 1. Si le vecteur vitesse d`un point matériel garde à tout instant la

ACCOMPAGNEMENT PERSONNALISÉ TS
LOIS DE NEWTON – CORRECTION
Exercice 1 : QCM / Vrai ou faux
1. Si le vecteur vitesse d’un point matériel garde à tout instant la même direction, le
mouvement est rectiligne. VRAI.
2. Un mobile en mouvement circulaire uniforme a une accélération uniquement
centripète. VRAI.
3. Un mobile dont la norme de la vitesse est constante a une accélération nulle.
FAUX (exemple du mouvement circulaire uniforme).
4.
a. La vitesse est donnée par l’expression
⃗v=λ ⃗
i+
(
β−2αt
)
⃗
j
.
b. L’accélération est donnée par l’expression
⃗a=−2α⃗
j
.
c. Le mouvement est uniformément accéléré.
5. La force d’attraction gravitationnelle exercée par le Soleil sur la Terre a la même
norme que la force d’attraction gravitationnelle exercée par la Terre sur le Soleil.
VRAI.
6. Un système est pseudo-isolé si la somme des normes des forces qui s’appliquent
sur lui est nulle. FAUX (si la somme des vecteurs forces extérieures est nulle).
7. Dans un référentiel galiléen, tout système est soit en mouvement rectiligne
uniforme, soit au repos. FAUX (un système peut avoir n’importe quel mouvement
indépendamment du référentiel dans lequel on l’étudie).
8. Un ascenseur s’élève à vitesse constante. La somme vectorielle des forces qui
s’appliquent sur les passagers est non nulle. FAUX (mouvement rectiligne uniforme
pour un système de masse constante, donc somme des forces extérieures nulle).
9. L’éjection de matière vers l’arrière par un système a pour effet de propulser
celui-ci en avant. VRAI.
10.Si la norme de la quantité de mouvement d’un point matériel A vaut 1,2 kg.m.s-1
et que celle d’un point matériel B vaut 0,4 kg.m.s-1, alors la quantité de mouvement
du système constitué de A et de B a pour norme 1,6 kg.m.s-1. FAUX (ex. : pA orienté
vers la gauche et pB orienté vers la droite, soit somme de norme 1,2 kg.m.s-1).
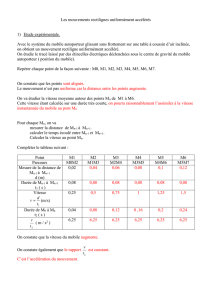
Exercice 2 : Le téléski
1. Les forces qui s’exercent sur le système
{skieur} dans le référentiel terrestre,
supposé galiléen, sont son poids
⃗
P
, la
réaction normale du support
⃗
RN
(la
composante tangentielle de la réaction du
support est nulle du fait de l’absence de
frottements des skis sur la neige), et la force
⃗
F
de traction de la perche.
2. cf. schéma
3. Dans ce repère, les forces s’expriment comme
⃗
RN=RN⃗
j
;
⃗
F=F.cosα⃗
i+Fsin α⃗
j
et
⃗
P=−P.sinβ⃗
i−P cosβ⃗
j
.
4. D’après le principe fondamental de la dynamique,
Σ
⃗
Fext =d⃗p
dt
.
Or le mouvement du skieur est rectiligne uniforme et sa masse est constante, donc
sa quantité de mouvement est constante, et la dérivée de cette quantité de
mouvement est nulle.
Par ailleurs, on peut écrire
Σ
⃗
Fext =⃗
P+
⃗
RN+⃗
F
. Ainsi
⃗
P+
⃗
RN+⃗
F=⃗
0
.
En projetant cette expression sur l’axe (Ox), on obtient : F.cos (α) – P.sin (β) = 0,
soit
F=P.sin
(
β
)
cos
(
α
)
=m.g.sin
(
β
)
cos
(
α
)
.
5. A.N. :
F=80×10×sin
(
10
)
cos
(
30
)
=1,6 .102N
.
Exercice 3 : Le billard
1. Le système étant pseudo-isolé, sa quantité de mouvement est constante, d’après
la loi de conservation de la quantité de mouvement.
2. Les deux boules ont la même masse, et la quantité de mouvement du système
formé par les deux boules est constante. On peut donc écrire :
⃗
pavant =
⃗
paprès
avec
⃗
pavant =
⃗
p1i+
⃗
p2i=m.
⃗
vi+m.⃗
0=m.
⃗
vi
et
⃗
paprès =
⃗
p1f +
⃗
p2f =m.⃗
0+m.
⃗
vf=m.
⃗
vf
.
Ainsi, on en déduit
m.
⃗
vi=m.
⃗
vf
soit
⃗
vi=
⃗
vf
. La seconde boule après le choc
part en mouvement rectiligne uniforme dans la direction et le sens du mouvement
initial de la première boule.
3. Si la deuxième boule était deux fois plus légère que la première, par conservation
de la quantité de mouvement, on aurait
m1.
⃗
vi=m2.
⃗
vf=m1
2.
⃗
vf
, soit
⃗
vf=2
⃗
vi
.
Exercice 4 : Trajectoire d’un avion de chasse
1. Le repère le plus adapté à cette étude est le repère mobile de Frénet.
2. Dans la base de Frénet, l’accélération s’exprime comme
⃗
a=dv
dt ⃗
t+v2
R⃗
n
.
Ici, la vitesse est constante, donc la composante tangentielle de l’accélération est
nulle. Il reste sa compostante normale :
a=v2
R
, soit
a=1
1,0 .103×
(
1000.103
3600
)
2
.
On en conclut que l’accélération de G s’exprime comme
⃗a=an⃗n
,
avec a = 7,7.101 m.s-2.
3. D’après le principe fondamental de la dynamique, on a
Σ
⃗
Fext =d⃗p
dt
.
Le pilote étant un système de masse constante, cette expression devient

Σ
⃗
Fext =m. d⃗v
dt =m.⃗a
, soit
Σ
⃗
Fext =m. v2
R⃗
n
.
Si l’on appelle
⃗
F
la résultante des forces qui s’exercent sur le pilote, on constate
d’après cette expression que
⃗
F
possède uniquement une composante selon le
vecteur
⃗
n
, c’est à dire selon le rayon du cercle de la trajectoire (composante
radiale).
A.N. :
⃗
F=m.an⃗n
donc F = 80 × 7,7.101 = 6,2.103 N.
4.
F
m.g=6,2.103
80×9,81 =7,9
.
On dit que le pilote subit alors une accélération de “ 7,9.g ”.
Exercice 5 : Le mur du son
1. a. Puisque l’avion vole à une vitesse constante selon une trajectoire rectiligne,
il possède un mouvement rectiligne uniforme dans le référentiel terrestre, supposé
galiléen. Ainsi, son vecteur vitesse est constant, et son accélération est nulle.
b. L’avion est soumis à son poids, à la portance, à la force de poussée exercée
par les réacteurs (qui est une force extérieure si l’on exclut les réacteurs du système
étudié) et à la traînée.
Le principe fondamental de la dynamique donne
Σ
⃗
Fext =d⃗p
dt
. Ici, l’accélération
est nulle, la masse est constante, donc on peut écrire
d⃗p
dt =⃗
0
.
On en déduit
Σ
⃗
Fext =⃗
0
. Les quatre forces se compensent.
2. a. Cette expression signifie que la norme de l’accélération est 9 fois supérieure
à la valeur du champ de pesanteur de la Terre : a = 9 × 9,81 = 8,8.101 m.s-2.
b. La vitesse initiale de l’avion vaut 300 km.h-1, soit 8,3.101 m.s-1.
Avec une accélération constante a, on peut écrire que la variation de vitesse Δv est
proportionnelle au temps d’accélération :
a=Δv
Δt
soit
Δt=Δv
a
.
A.N. :
Δt=340−83
8,8.101=2,9s
L’avion atteint le mur du son en environ trois secondes.
1
/
2
100%