CG - HOMOTHETIES ET TRANSLATIONS DU PLAN

CG - HOMOTHETIES ET TRANSLATIONS
DU PLAN
Si l’on note Ple plan affine, on appelle transformation du plan toute application Φdu plan dans lui
même. Si Mest un point de P, on notera M′l’image de Mpar la transformation :
Φ(M) = M′.
On notera Id l’application identique du plan, c’est-à-dire la transformation qui à un point Massocie
le point Mlui même.
Un point fixe (ou invariant) de la transformation, sera un point Mtel que
Φ(M) = M .
L’ensemble des transformations du plan est muni de la composition des applications.
Dans ce qui suit, on étudie de manière purement géométrique les translations et les homothéties du plan.
Translation de vecteur −→
V
Si −→
Vest donné, pour tout point Mdu plan, il existe un unique point M′, tel que
−−−→
MM′=−→
V .
On définit ainsi une transformation du plan dans lui même, appelée translation de vecteur −→
V, en
associant à Mle point M′. On la note T−→
V.
On remarque que Mest un point fixe si et seulement si −→
Vest nul. Dans ce cas tout point est fixe et
T−→
0est l’application identique.
Caractérisation d’une translation
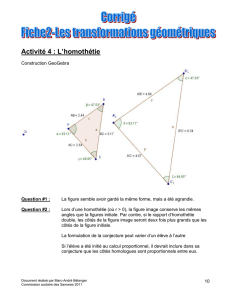
Théorème 1 Une transformation Φest une translation, si et seulement si, quels que soient les
points Met P, on a −−−−−−−→
Φ(M)Φ(P) = −−→
MP .
Si l’on a
Φ = T−→
V,

CG 2
alors −−−−−→
MΦ(M) = −−−−→
PΦ(P) = −→
V ,
donc
−−−−−−−→
Φ(M)Φ(P) = −−−−−→
Φ(M)M+−−→
MP +−−−−→
PΦ(P)
=−−→
V+−−→
MP +−→
V
=−−→
MP .
Réciproquement, supposons que, quels que soient Met P, on ait
−−−−−−−→
Φ(M)Φ(P) = −−→
MP .
Soit Pun point fixé, et Φ(P)sont image. Posons
−→
V=−−−−→
PΦ(P).
Alors, si Mest dans P, on a
−−−−−→
MΦ(M) = −−→
MP +−−−−→
PΦ(P) + −−−−−−−→
Φ(P)Φ(M)
=−−→
MP +−→
V−−−→
MP
=−→
V ,
et donc Φest la translation de vecteur −→
V.
Cette démonstration traduit simplement les propriétés du parallélogramme.
>
M
>
P
6Φ(M)
6
Φ(P)

CG 3
Propriétés d’une translation
Il résulte de cette caractérisation qu’une translation Φ
a) conserve les longueurs (on a k−−−−−−−→
Φ(M)Φ(P)k=k−−→
MP k) ;
b) transforme le cercle de centre Ωet de rayon R, en le cercle de centre Φ(Ω) et de rayon R(puisque
k−−−−−−−→
Φ(Ω)Φ(M)k=k−−→
ΩMk=R);
c) transforme une droite passant par Ωde vecteur directeur −→
Uen une droite parallèle passant par
Φ(Ω) (si Pest sur la droite, −−−−−−−→
Φ(Ω)Φ(P) = −→
ΩP=λ−→
U) ;
d) transforme deux droites parallèles en deux droites parallèles (conséquence de c) ;
e) transforme deux droites faisant un angle de mesure αen deux droites faisant le même angle de
mesure α(ces deux droites étant parallèles aux deux premières toujours d’après c) ;
f) transforme deux droites orthogonales en deux droites orthogonales (cas particulier de e).
Théorème 2 L’ensemble des translations du plan est un groupe commutatif pour la composition
des applications. Ce groupe est isomorphe au groupe additif des vecteurs du plan.
On a de manière évidente les relations
T−→
V◦T−→
V′=T−→
V+
−→
V′,
et
T
−
−→
V= (T−→
V)−1.
L’application −→
V7→ T−→
Vest un isomorphisme du groupe additif des vecteurs du plan sur le groupe des
translations.
Homothétie de centre Oet de rapport k.
Si kest un nombre réel non nul, et Oun point du plan, l’homothétie de centre Oet de rapport k,
est la transformation qui à tout point Mdu plan, associe le point Φ(M)défini par
−−−−−→
OΦ(M) = k−−→
OM .
Le point Mest un point fixe, si et seulement si
−−→
OM =k−−→
OM .

CG 4
Lorsque k= 1, cette relation est vraie quel que soit M, et dans ce cas l’homothétie est Id. Dans le cas
contraire, elle est vraie si et seulement si M=O. le centre Oest alors le seul point fixe de l’homothétie.
On notera H(O,k)l’homothétie de centre Oet de rapport k.
Caractérisation d’une homothétie de rapport k6= 1
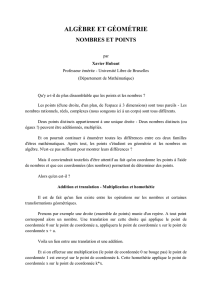
Théorème 3 Une transformation Φest une homothétie de rapport k6= 1, si et seulement si, quels
que soient les points Met P, on a
−−−−−−−→
Φ(M)Φ(P) = k−−→
MP .
Si Φest une telle homothétie, on a
−−−−−→
OΦ(M) = k−−→
OM et −−−−→
OΦ(P) = k−−→
OP .
Alors
−−−−−−−→
Φ(M)Φ(P) = −−−−→
OΦ(P)−−−−−−→
OΦ(M)
=k−−→
OP −k−−→
OM
=k(−−→
OP −−−→
OM)
=k−−→
MP .
Réciproquement, si Φvérifie, quels que soient les points Met P
−−−−−−−→
Φ(M)Φ(P) = k−−→
MP ,
avec k6= 1, la transformation Φn’est donc pas l’application Id. Il existe un point Ptel que Φ(P)soit
distinct de P. Fixons un tel point, et appelons Ole barycentre des points (P, k)et (Φ(P),−1), qui est
tel que −−−−→
OΦ(P) = k−−→
OP ,
c’est-à-dire −−→
OP =1
k−1
−−−−→
PΦ(P).
Alors, si Mest un point du plan, on a
−−−−−→
OΦ(M) = −−−−→
OΦ(P) + −−−−−−−→
Φ(P)Φ(M)
=k−−→
OP +k−−→
P M
=k(−−→
OP +−−→
P M)
=k−−→
OM .
On a donc bien une homothétie de centre Oet de rapport k.

CG 5
Φ(M)
MUP
U
Φ(P)
O
-
-
Propriétés d’une homothétie
Il résulte de cette caractérisation qu’une homothétie de rapport k
a) multiplie les longueurs par |k|(on a k−−−−−−−→
Φ(M)Φ(P)k=kk−−→
MP k=|k| k−−→
MP k) ;
b) transforme le cercle de centre Ωet de rayon R, en le cercle de centre Φ(Ω) et de rayon |k|R(puisque
k−−−−−−−→
Φ(Ω)Φ(M)k=|k| k−−→
ΩMk=|k|R);
c) transforme une droite passant par Ωde vecteur directeur −→
Uen une droite parallèle passant par
Φ(Ω) (si Pest sur la droite, −−−−−−−→
Φ(Ω)Φ(P) = k−→
ΩP=λ−→
U) ;
d) transforme deux droites parallèles en deux droites parallèles (conséquence de c) ;
e) transforme deux droites faisant un angle de mesure αen deux droites faisant le même angle de
mesure α(ces deux droites étant parallèles aux deux premières toujours d’après c) ;
f) transforme deux droites orthogonales en deux droites orthogonales (cas particulier de e).
Théorème 4 L’ensemble des homothéties de centre Oest un groupe commutatif pour la com-
position des applications. Ce groupe est isomorphe au groupe multiplicatif R∗des réels non nuls.
On a de manière évidente les relations
H(O,k)◦H(O,k′)=H(O,kk′),
et
H−1
(O,k)=H(O,k−1).
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%