Mouvements à forces centrales

Lycée G. Monod, MPSI, Physique-Chimie 28 mars 2017
Mouvements à forces centrales
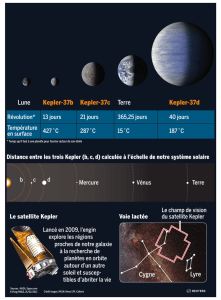
Dans ce chapitre, il s’agit de montrer en quoi les lois qui ont été vues durant
les chapitres précédents du cours de mécanique permettent de comprendre
le mouvement des planètes et satellites.
1 Propriétés générales des mouvement à force cen-
trale
1.1 Force centrale : définition et cadre
Force centrale Soit un objet modélisé par un point matériel M, et soit #„
Fune
force agissant sur M. S’il existe un point Otel que #„
Fsoit à chaque instant
colinéaire à # „
OM, alors #„
Fest une force centrale et Oest appelé le centre de
force.
•
O
•
M
#„
F
#„
ur
Restriction pour le chapitre Nous nous restreindrons au cas où la force #„
F
est telle que :
•sa norme Fne dépend que de la distance r=k−−→
OMk:#„
F=F(r)#„
ur;
•
#„
Fest conservative.
La force #„
Fdérive donc d’une énergie potentielle Epqui n’est fonction que de
r:
#„
F=F(r)#„
uret F(r) = −dEp
dr (r). (1)
Exemples de telles forces
•La force gravitationnelle #„
F(r) = −Gm1m2
r2
#„
ur
•La force électrostatique #„
F(r) = 1
4πe0
q1q2
r2
#„
ur
•La force de rappel élastique #„
F(r) = −k(r−l0)#„
ur
1.2 Conservation du moment cinétique
Appliquons le théorème du moment cinétique à #„
LO(M), où Mest un point
matériel soumis à une force centrale #„
F:
d
#„
LO
dt =
# „
OM ∧
#„
F=r F(r)#„
ur∧#„
ur=#„
0 . (2)
Donc #„
LOest un vecteur constant ou invariant du mouvement.
Conservation du moment cinétique Si le mouvement est à forces centrales,
son moment cinétique par rapport au centre de force Oest une constante
(vectorielle) du temps, déterminé par les conditions initiales :
#„
LO(t) = # „
const =
#„
LO(0). (3)
1.2.1 Planéité du mouvement
On rappelle que #„
LO=
# „
OM ∧m#„
vdonc à tout moment # „
OM(t)⊥
#„
LOoù #„
LO=
# „
const. Le mouvement a donc nécessairement lieu dans le plan contenant Oet
othogonal à #„
LO.
Planéité du mouvement Un mouvement à forces centrales est plan : il a
lieu dans le plan contenant le centre de forces Oet orthogonal au moment
cinétique par rapport à O.
Remarque Dans le cas où le moment cinétique est nul, le mouvement a lieu
selon une droite passant par O.
•
M
•
O
#„
uz
#„
LO
r
#„
ur
#„
uz
#„
uθ
#„
v
1

Lycée G. Monod, MPSI, Physique-Chimie 28 mars 2017
1.2.2 Loi des aires
Plaçons-nous dans le repère cylindrique en choisissant le vecteur #„
uzsuivant
#„
LO. Écrivons l’expression de #„
LOdans ce repère :
#„
LO=
# „
OM ∧m#„
v=r#„
ur∧m(.
r#„
ur+r.
θ#„
uθ) = mr2.
θ#„
uz. (4)
Donc la quantité r2.
θest une constante : on l’appelle constante des aires et on la
note C.
Constante des aires Dans un mouvement à forces centrales, si on se place
en coordonnées cylindriques, la quantité C=r2(t).
θ(t)est une constante du
temps appelée constante des aires.
Interprétation Quelle est l’aire dA balayée par le vecteur position #„
r=
# „
OM
lors d’un intervalle élémentaire de temps dt (c’est-à-dire entre tet t+dt) ?
La quantité dθest la différence θ(t+dt)−θ(t). Au premier ordre en dθ(ou
en dt, c’est équivalent), cette aire est celle du triangle OMH, c’est-à-dire 1
2r×
rtan(dθ), qui s’approxime (toujours au premier ordre) en dA =1
2r2dθ.
O
•M(t)
•
M0(t+dt)
•
H•
#„
ur
#„
uθ
r
dθ
Aire de la partie grisée : dA =1
2r2dθ+O(dθ2)
Vitesse aréolaire On appelle vitesse aréolaire l’aire balayée par le vecteur
position # „
OM par unité de temps. D’après ce qui précède :
varolaire =dA
dt =1
2r2dθ
dt =C
2=constante. (5)
Loi des aires Dans un mouvement à forces centrales, la vitesse aréolaire est
constante et vaut C/2.
1.3 Conservation de l’énergie mécanique
Comme on suppose que la force #„
Fest conservative, l’énergie mécanique Em
se conserve d’après le théorème de l’énergie mécanique :
Em=1
2mv2+Ep(r) = constante. (6)
1.3.1 Energie potentielle effective
Dans l’expression ci-dessus, on peut exprimer différemment v2en utilisant
l’expression de la constante des aires. En coordonnées cylindriques :
v2=.
r2+ (r.
θ)2=.
r2+C2
r2. (7)
Donc l’énergie mécanique peut s’écrire sous la forme :
Em=1
2m.
r2+Ep(r) + m C2
2r2. (8)
Le terme .
rcorrespond à la variation strictement radiale du mouvement.
Énergie potentielle effective Il s’agit de la quantité définie par :
Eeff
p(r) = Ep(r) + m C2
2r2. (9)
L’énergie mécanique s’écrit, pour un mouvement à forces centrales :
Em=1
2m.
r2+Eeff
p(r).
L’intérêt de cette quantité est qu’elle contient toute la dépendance de Emen
r, et que nécessairement :
Em>Eeff
p(r), (10)
car 1
2m.
r2>0. Les mouvements possibles correspondent donc aux rvérifiant
cette condition.
1.3.2 États libres et états liés
On distingue deux types de mouvements :
•Si les rvérifiant la condition (10) sont bornés (figure de gauche), mouve-
ment est qualifié d’état lié (au centre de force).
2

Lycée G. Monod, MPSI, Physique-Chimie 28 mars 2017
•Dans le cas contraire (figure de droite), le mouvement est qualifié d’états
libre.
0r
Eeff
p
Em
rmin rmax
raccessibles
État lié
0r
Eeff
p
Em
rmin
raccessibles
État libre
2 Forces newtoniennes et lois de Kepler
2.1 Définition
Force newtonienne On appelle force newtonienne une force centrale de la
forme #„
F=−κ
r2
#„
ur, où r=OM est la distance du point matériel au centre de
force et κest un une quantité indépendante de r.
Exemples Force gravitationnelle (κ=Gm1m2) et la force électrostatique
(κ=−1
4πe0q1q2) sont des forces newtoniennes.
Énergie potentielle associée La force #„
F=−κ
r2
#„
urest associée à l’énergie
potentielle :
Ep(r) = −κ
r. (11)
2.2 Lois de Kepler
2.2.1 Ellipse
F F0
M
M0
a
b
cx
y
Une ellipse est une courbe plane définie comme le lieu des points Mtels
que dont la somme des distances à deux points fixes Fet F0, dits foyers, est
constante. Cette constante est appelée longueur du grand axe et notée 2a.
Sur la figure, on a donc : FM +MF0=FM0+M0F0. Notations :
•aest appelée demi-grand axe ;
•best appelée demi-petit axe ;
•cest la distance entre le centre de l’ellipse et l’un des deux foyers.
L’équation cartésienne de l’ellipse est :
x2
a2+y2
b2=1. (12)
L’excentricité de l’ellipse, notée e, est définie par e=c/a=√a2−b2/a.
2.2.2 Historique
Les lois ci-dessous ont été découvertes par le savant allemand Johannes Ke-
pler à partir des observations et mesures de la position des planètes faites
par l’astronome danois Tycho Brahe, mesures qui étaient très précises pour
l’époque.
Copernic avait soutenu en 1543 que les planètes tournaient autour du Soleil,
mais il s’appuyait sur le mouvement circulaire uniforme, hérité de l’antiquité
grecque.
Les deux premières lois de Kepler sont publiées en 1609 et la troisième en
1618. Les orbites elliptiques, telles qu’énoncées dans ses deux premières lois,
permettent d’expliquer la complexité du mouvement apparent des planètes
dans le ciel sans recourir aux « épicycles », « excentriques » et autre « équant »
des modèles copernicien et ptoléméen.
Ces lois seront justifiées théoriquement par Isaac Newton à la fin du 17ème
siècle, suite à sa découverte de la théorie de la gravitation universelle.
2.2.3 Lois de Kepler
Historiquement, les lois de Kepler ont été énoncées pour les planètes en or-
bite autour du Soleil, mais nous les généralisons ici à tout satellite en orbite
autour de tout astre.
3

Lycée G. Monod, MPSI, Physique-Chimie 28 mars 2017
P
S
a
A2A1
B1
B2
Un satellite Sest en orbite autour d’une planète P. Cette orbite est elliptique
de demi-grand axe a, et le rapport T2/a3(où Test la période de révolution)
est indépendante de l’orbite. Le satellite parcourt les portions d’orbite A1A2
et B1B2en un même temps : les aires coloriées sont égales.
Première loi de Kepler Les satellites parcourent des trajectoires elliptiques
dont l’astre attracteur occupe un des foyers.
Deuxième loi de Kepler Ces trajectoires sont parcourues conformément à
la loi des aires.
Troisième loi de Kepler Les carrés des périodes de révolution T2et les cubes
des demi-grands axes a3des trajectoires sont dans un rapport constant pour
toutes les orbites, donc pour tous les satellites :
T2
a3=cste, (13)
où cste ne dépend que des caractéristiques de l’astre attracteur.
2.3 Trajectoires et vitesses cosmiques
2.3.1 Mouvements possibles pour une force newtonienne attractive
On se focalise ici sur le cas où κ>0 (la force newtonienne est attractive).
L’énergie mécanique s’écrit alors :
Em=1
2m.
r2+Eeff
p(r)avec Eeff
p(r) = −κ
r+m C2
2r2. (14)
La courbe de Eeff
p(r)est tracée ci-dessous. Son minimum correspondant à
rmin =r0est déterminé par l’équation dEeff
p
dr (r0) = 0 soit κ
r2
0
=m C2
r3
0
d’où
r0=m C2
κ. Et Eeff
p(r0) = −κ2
2m C2=−κ
2r0.
Considérons le mouvement d’un point matériel Md’énergie mécanique Em.
Suivant la valeur de Em, il y a plusieurs mouvements possibles.
•Si Em<Eeff
p(r0), aucun mouvement n’est possible.
•Si Em=Em,0 =Eeff
p(r0), alors .
r=0 : il n’y a aucune variation radiale de
la trajectoire. Celle-ci est donc un cercle de rayon r0=m C2
κ.
•Si Em=Em,1 <0, les seules valeurs de raccessibles sont celles telles que
r0
1≤r≤r00
1: la trajectoire est comprise entre deux cercles de rayons r0
1et
r00
1, il s’agit d’un état lié.
On peut montrer (mais ce n’est pas au programme de MPSI) que ces
trajectoires sont des ellipses, c’est la 1ère loi de Kepler.
•Si Em=Em,1 ≥0, toutes les valeurs de rsupérieures à r2sont accessibles.
Il s’agit d’un état libre, le point Mpeut s’éloigner infiniment de O.
On peut montrer (ce n’est pas non plus au programme de MPSI) que ces
trajectoires sont des hyperboles lorsque Em>0 et des paraboles lorsque
Em=0.
0r
Eeff
p
Em,1
r0
1r00
1
Em,2
r2
Em,0
r0
m C2
2r2
−κ
r
4

Lycée G. Monod, MPSI, Physique-Chimie 28 mars 2017
2.3.2 Cas d’une trajectoire circulaire due à la force gravitationnelle
On considère un point matériel de masse msoumis à la force gravitationnelle
due à un astre de masse M, tel qu’un satellite attiré par un astre. On se focalise
sur le cas d’une trajectoire circulaire de rayon a. Il s’agit d’un cas particulier
d’ellipse tel que a=b.
Énergie mécanique Comme r(t) = a,.
r=0 et Em=Eeff
p(a), qui est aussi
le minimum de Eeff
p(r). Cette valeur a été calculée au paragraphe précédent :
Em=−κ
aavec κ=GMm, soit :
Em=−GMm
a. (15)
Relation entre période et rayon Écrivons le PFD dans le repère cylindrique,
en sachant que r(t) = a:
m#„
a=m..
r+r.
θ2#„
ur−mr..
θ+2.
r.
θ#„
uθ=−κ
r2
#„
ur
⇒ −m a .
θ2#„
ur+m a ..
θ#„
uθ=−κ
a2
#„
ur. (16)
•Suivant #„
uθ,..
θ=0, autrement dit la vitesse angulaire ω=.
θest constante
et le mouvement est circulaire uniforme.
Comme θ(t) = ωt, la période de révolution Test donnée par 2π=ωT
et vaut T=2π/ω.
•Suivant #„
ur, on a donc m a ω2=κ
a2, donc, en écrivant ω=2π/Tet
κ=GMm :
T2
a3=4π2
GM, (17)
ce qui correspond à la troisième loi de Kepler.
2.3.3 Altitude des satellites géostationnaires
Déterminons l’altitude d’un satellite géostationnaire. Celui-ci est défini
comme ayant une position fixe dans le référentiel terrestre, ou encore comme
étant en permanence à la verticale d’un même point de la Terre. Ce point est
par conséquent nécessairement situé sur l’équateur!
Sa période de révolution Test donc la même que celle de la planète bleue, à
savoir 24 h environ ou 86400 s.
Comme G=6,67 ×10−11 N·m2·kg−2et MT=5,98 ×1024 kg, on obtient en
appliquant la formule (17) :
ageost. =3
rGMT2
4π2'35 800 km. (18)
2.3.4 Vitesses cosmiques
Première vitesse cosmique La 1ère vitesse cosmique notée v∗
1est définie comme
la vitesse minimale que doit avoir un point matériel pour être en orbite autour
de la Terre à altitude basse.
Pour la déterminer, on considère une orbite circulaire de rayon égal à celui de
la Terre RT. On reprend la projection du PFD (16) suivant #„
ur:m a ω2=κ
a2
avec a=RT. Comme la vitesse vaut v=RTω, on trouve : (v∗
1)2=κ
mRT
,
soit :
v∗
1=sGMT
RT
. (19)
Deuxième vitesse cosmique La 2ème vitesse cosmique notée v∗
2est définie
comme la vitesse de libération d’un point matériel au départ de la Terre, au-
trement dit la vitesse minimale permettant de s’éloigner indéfiniment de la
Terre.
Comme on l’a vu, cette vitesse correspond à une énergie mécanique nulle, or
cette énergie prise à la surface de la terre vaut 1
2m v2−κ
RT
. Donc 1
2m(v∗
2)2−
GMTm
RT
=0 et :
v∗
2=s2GMT
RT
. (20)
5
1
/
5
100%