CHAPITRE 3 – Repères, points et droites

Mathématiques - Cours de Seconde - CHAPITRE 3 – Repères, points et droites
CHAPITRE 3 – Repères, points et droites
A) Repères et coordonnées des points
1) Repères
Pour représenter le plan en géométrie analytique, on a besoin de définir deux axes, qu'on appelle axe des
abscisses et axe des ordonnées, et dont le point d'intersection s'appelle l'origine et se note généralement O.
Ces deux axes peuvent être perpendiculaires (on parle alors de repère orthogonal) ou pas. Sur chacun de ces
axes, on définit une unité, qui peut avoir la même longueur (repère normé) ou non.
La plupart du temps, on utilise un repère orthonormé (ou orthonormal), c'est à dire un repère à axes
perpendiculaires (orthogonaux) et portant la même longueur comme unité ("normés").
L'utilisation d'un repère permet aussi de résoudre des problèmes géométriques grâce aux théorèmes de la
géométrie analytique que nous allons étudier.
On caractérise un repère par son origine O(0 ; 0), son point I(1 ; 0) et son point J(0 ; 1). On parlera alors du
repère (O, I, J).
Exemples :
Page 1/7

Mathématiques - Cours de Seconde - CHAPITRE 3 – Repères, points et droites
2) Coordonnées cartésiennes d'un point
Tout point M du plan peut être défini entièrement par ses coordonnées cartésiennes, à savoir son abscisse et son
ordonnée.
L'abscisse se détermine en traçant la parallèle à l'axe des ordonnées passant par M et en prenant le point
d'intersection avec l'axe des abscisses. De même, l'ordonnée se trouve en traçant la parallèle à l'axe des
abscisses passant par M et en prenant le point d'intersection avec l'axe des ordonnées.
On note M(x ; y) pour exprimer que M a pour abscisse x et pour ordonnée y (notez que dans le logiciel
Geogebra, les coordonnées doivent être séparées par une virgule et non un point-virgule).
Remarque :
Il existe aussi des coordonnées "polaires", qui prennent la distance OM et l’angle entre [Ox) et [OM).
Exemples :
Placer les points A(5 ; -1), B(3 ; 2) et C(-2 ; 1) dans les repères dessinés au 1).
3) Coordonnées du milieu d'un segment (repère quelconque)
Théorème :
Soient les points M(xM ; yM) et N(xN ; yN).
Le milieu C du segment [MN] aura alors pour coordonnées :
C
(
xN+xM
2 ; yN+yM
2
)
.
Page 2/7

Mathématiques - Cours de Seconde - CHAPITRE 3 – Repères, points et droites
Démonstration :
Il suffit d'appliquer le théorème de Thalès aux triangles MAC et MBN puis aux triangles MDC et MEN pour
voir que A est le milieu de [MB] et D le milieu de [ME], ce qui entraîne le résultat.
Exemples :
Calculer les coordonnées des points D, E et F, milieux des segments [AB], [BC] et [AC] et placer ces points sur
les repères du 1).
4) Distance entre deux points (en repère orthonormé)
Théorème :
Reprenons nos deux points M et N, leur distance est égale à
xN−xM2yN−yM2
.
(Attention : Le repère doit être orthonormal, pour pouvoir appliquer le théorème de Pythagore !)
Démonstration :
On a MA = xN – xM et MB = AN = yN – yM, d'où en utilisant le théorème de Pythagore, MN² = AN² + AM², donc
MN =
AN²AM²
=
xN– xM2yN– yM2
.
5) Alignement de points (repère quelconque)
Théorème :
Soient trois points A(xA ; yA), B(xB ; yB), et C(xC ; yC).
Ils sont alignés si et seulement si on a
yB– y A
xB– xA
=yC– yA
xC– xA
.
Page 3/7

Mathématiques - Cours de Seconde - CHAPITRE 3 – Repères, points et droites
Exemples :
Dans chacun des cas suivants, déterminer si les trois points sont ou non alignés :
a) A(2 ; 1), B(3 ; 2), C(4 ; 3) (O)
b) A(3 ; -1), B(5 ; -2), C(1 ; -2) (N)
c) A(7 ; 5), B(4 ; 3), C(1 ; 1) (O)
Trouver l'ordonnée de C pour qu'il soit aligné avec A et B :
a) A(3 ; 2), B(5 ; 1), C(0 ; ?) (1)
b) A(3 ; 2), B(5 ; -2), C(0 ; ?) (5)
Trouver l'abscisse de C pour qu'il soit aligné avec A et B :
a) A(3 ; 2), B(5 ; 1), C(? ; 0) (7)
b) A(3 ; 2), B(5 ; -2), C(? ; 0) (4)
B) Les droites
1) Droite et fonction affine
Dans tout repère, la représentation graphique d'une fonction affine f(x) = a x + b est une droite. Il suffit donc de
placer deux points de cette droite pour la tracer.
Pour cela, on choisit une première valeur x1 pour x et on calcule y1 = a x1 + b, on place le point A(x1 ; y1), puis
une seconde valeur x2 et on calcule y2 = a x2 + b, on place le point B(x2 ; y2).
Il ne reste plus qu’à tracer la droite (AB).
Exemples :
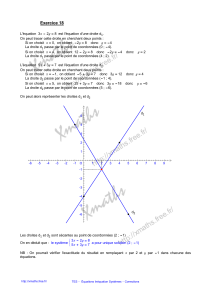
Tracer dans chaque repère les droites correspondant aux fonctions affines suivantes :
a) (d1) f(x) = x – 2
b) (d2) f(x) = 3 – 2x
c) (d3) f(x) = 2x + 1
Page 4/7

Mathématiques - Cours de Seconde - CHAPITRE 3 – Repères, points et droites
d) (d4) f(x) = -3x + 2
2) Équations de droites
L'équation de la représentation graphique d'une fonction f s'écrit y = f(x). Pour une droite correspondant à la
fonction affine f(x) = ax + b, l'équation s'écrit donc y = ax + b.
Cette équation sert à représenter toutes les droites du plan, sauf les droites parallèles à l'axe des ordonnées ! En
effet, celles-ci sont le lieu (ensemble) des points ayant même abscisse, autrement dit vérifiant l'égalité x = a, où
a est l'abscisse en question.
De façon générale, on peut donc dire que l'équation d'une droite quelconque s'écrit ax + by + c = 0 (où a et b ne
sont pas simultanément nuls).
On retrouve les droites de fonctions affines si b n'est pas nul, et les parallèles à (Oy) si b = 0.
On peut aussi dire que toute droite a une équation de la forme y = ax + b ou de la forme x = a.
Exemples :
a) Tracer les droites d'équation
y=x
21
, y = -x + 2 et x = 3.
b) Trouver l'équation de la droite verticale (parallèle à l'axe des ordonnées) passant par A(7 ; 1).
c) Trouver l'équation de la droite passant par les points A ci-dessus et B(8 ; -1).
3) Déterminer l’équation d’une droite connaissant deux points
Pour déterminer l’équation de (AB) connaissant les coordonnées de A(xA ; yA) et B(xB ; yB) , on peut procéder
ainsi :
a) On détermine le coefficient directeur a de (AB) par
a=yB– yA
xB– xA
.
b) On détermine l’ordonnée à l’origine b par
a=b – yA
0 – xA
, soit b=yA– a xA
.
Exemples :
Trouver l’équation de la droite (AB) :
Page 5/7
 6
7
6
7
1
/
7
100%