Télécharger

M1 Cinématique
Exercices de cours
Exercice 1 Loi horaire et trajectoireExercice 1 Trouver l’équation d’une trajectoire
Dans une base orthonormée quelconque du plan (O,−→
ex,−→
ey), le mouvement du point M est décrit par
−→
OM(t) = x(t)−→
ex+y(t)−→
eyoù §x(t) = c t2,c∈R+∗
y(t) = d t4,d∈R+∗
Donner l’équation de la trajectoire et son allure dans le plan. On supposera que −→
exet −→
eysont des vecteurs fixes dans le plan.
Exercice 2 Mouvement en coordonnées cartésiennes
Exercice 2 Exprimer la vitesse et l’accélération en cartésien
(1) En dérivant le vecteur −→
OM, exprimer le vecteur vitesse −→
v(M)R.
(2) En déduire l’accélération du point M.
Exercice 3 Lier les deux systèmes de coordonnéesExercice 3 Lier les coordonnées cylindriques et cartésiennes
On a représenté un système de coordonnées cartésiens (fixes) −→
ex,−→
ey,−→
ez, ainsi que le système de coordonnées polaires −→
er,−→
eθ,−→
ez, en faisant
coïncider les vecteurs −→
ez. En se référant à se schéma, répondez aux questions suivantes.
(1) Donner les expressions permettant de trouver ret θconnaissant xet y, puis l’inverse. Pour exprimer θ, on exprimera son sinus,
son cosinus et sa tangente.
(2) Exprimer −→
eret −→
eθen fonction de −→
exet −→
ey. Quelles sont leurs dérivées dans R?
Exercice 4 Cinématique en coordonnées cylindriquesExercice 4 Exprimer la vitesse et l’accélération en cylindrique
(1) Donner l’expression du vecteur position −→
OM utilisant les coordonnées cylindriques et projeté dans cette base.
(2) En déduire, en dérivant −→
OM l’expression du vecteur vitesse toujours dans cette même base en utilisant les mêmes coordonnées
(ou leur dérivées).
(3) En déduire l’expression du vecteur accélération en coordonnées cylindriques.
Exercice 5 Mouvement rectiligne uniformément accéléréExercice 5 Exprimer les équation horaires du mouvement
Choisir un système de coordonnées
On considère un point matériel M de masse m. On suppose, sans se préoccuper des causes, que son accélération −→
aest constante (de
norme a) pas seulement en norme mais aussi en direction et sens dans un référentiel donné R. On suppose qu’initialement la vitesse du
point M est nulle.
(1) Le mouvement aura-t-il une symétrie particulière ? Quel type de jeu de coordonnées choisir ?
(2) Où placer l’origine pour simplifier les équations du mouvement ?
(3) On choisit de placer le premier vecteur de la base selon le sens et la direction de l’accélération. Exprimer le vecteur −→
adans ce jeu
de coordonnées.
(4) En déduire les équations horaires du mouvement.
1

M1: Cinématique Exercices de cours
Exercice 6 Mouvement curviligne uniformément accéléréExercice 6 Trouver la trajectoire du mouvement
Choisir le bon système de coordonnées
On considère un point matériel M de masse m. On suppose, sans se préoccuper des causes, que son accélération −→
aest constante (de
norme a) pas seulement en norme mais aussi en direction et sens dans un référentiel donné R. On suppose qu’initialement la vitesse du
point M est un vecteur −→
v0.
(1) Quel type de coordonnées va-t-on choisir pour décrire le mouvement? Comment peut-on choisir l’origine du repère?
(2) On choisit à nouveau le premier vecteur dans la direction et le sens de l’accélération. Comment choisir les 2 autres vecteurs de la
base pour simplifier l’écriture de la vitesse initiale? On pourra faire un schéma pour aider au raisonnement.
(3) Déterminer les équation horaires du mouvement.
(4) En déduire la trajectoire du point M. De quel type de courbe s’agit-il?
(5) Représenter l’allure de la trajectoire ainsi que quelques vecteurs vitesse et accélération.
Exercice 7 Mouvement circulaire uniformeExercice 7 Exprimer les vecteurs position, vitesse et accélération
Représenter les vecteurs vitesse et accélération
On étudie le mouvement d’un cheval d’un manège assimilé à un point matériel M dans le référentiel terrestre. La distance, constante,
entre l’axe de rotation du manège et le cheval est notée R, la vitesse angulaire de rotation est constante : ω(en rad.s−1).
Le cheval reste toujours à la même hauteur.
Choisir un jeu de coordonnées adapté à l’étude du mouvement. Donner alors les expressions des vecteurs position, vitesse et
accélération dans cette base pour ce mouvement.
Représenter en deux points de la trajectoire le vecteur vitesse et accélération.
Exercice 8 Mouvement circulaire non uniformeExercice 8 Exprimer les vecteurs position, vitesse et accélération
Représenter les vecteurs vitesse et accélération
Une masse est suspendue au bout d’une tige tendue, fixée en un point O. Le référentiel d’étude est tel que O est fixe. La tige est susceptible
de tourner autour de ce point O, mais pas forcément à vitesse de rotation constante. La tige est inextensible et la longueur de la tige entre
le point O et la masse est notée R.
On notera −→
v=v(t)−→
eθ: selon le signe de v(t)le point tournera dans un sens ou l’autre. On peut ici aussi choisir le plan (xOy)comme
plan de la trajectoire avec O le centre du cercle.
Choisir un jeu de coordonnées adapté à l’étude du mouvement. Donner alors les expressions des vecteurs position en fonction
de R, vitesse ( en fonction de R et dθ
dt) et accélération (en fonction de v,dv
dtet R) dans cette base pour ce mouvement.
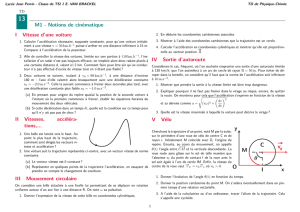
Exercice 9 Accélération d’une trajectoire planeExercice 9 Placer qualitativement l’accélération sur une courbe plane
En différents points de cette trajectoire, tracer l’allure du vecteur vitesse et accélération. On supposera que le point parcours la courbe
vers la droite et que le mouvement est ralenti avant le point A, et accéléré après le point A.
A
x
y
Exercice 10 Solide en rotation autour d’un axe fixeExercice 10 Exprimer la vitesse d’un point d’un solide en rotation (axe fixe)
Dans un référentiel, un solide est en rotation autour d’un axe fixe ∆à la vitesse de rotation ω. On veut connaître en tout point M du solide,
la norme de la vitesse du point. Dans quel jeu de coordonnées se placer ? Exprimer la norme de la vitesse d’un point quelconque
du solide en fonction de ωet d’autres paramètres éventuels.
2/2
1
/
2
100%