Dynamique en référentiel non galiléen :

Dynamique en référentiel non galiléen :
Cinématique : Mouvement relatif à un référentiel donné.
Référentiel : Ensemble d'observateurs immobiles les uns par rapport aux autres.
Dynamique : Le PFD s'applique relativement à un référentiel galiléen.
A la recherche d'un référentiel galiléen. Et les autres ? (terrestre).
I) Changement de référentiel :
1) Le mouvement relatif de deux observateurs :
On considère deux référentiels, un référentiel qu'on qualifiera d'absolu (choix arbitraire) qui est fixe
par rapport à nous, et un autre référentiel, respectivement
R∗O ,
i ,
j ,
k
et
RO ' ,
i ' ,
j ' ,
k '
Étude du mouvement relatif de R par rapport à R *
:
=> Mouvement de translation :
déplacement de O' dans R*.
Il est caractérisé par
vR/R∗=
vR∗O '= d
OO '
dt )R∗
vR/R∗
est une vitesse instantanée qui peut varier en norme et en direction.
Cas simple : ,
vRO=
cste= v0
mouvement de translation rectiligne et uniforme.
Mouvement de translation circulaire uniforme.
=> Mouvement de rotation des vecteurs
i ' ,
j ' ,
k '
dans R *
:
Les vecteurs restent des vecteurs unitaires et la base reste orthonormée directe.
=> Détermination de
d
i '
dt
∣
R∗
,d
j '
dt
∣
R∗
,d
k '
dt
∣
R∗
Raisonnement dans un cas simple : axe de rotation
k '
.
di '=
i ' tdt−
i 't
dj '=
j ' tdt−
j 't
di '=d
j '
˙
= d
dt
vitesse angulaire instantanée de rotation.
Vecteur rotation
R/R∗
:
–Direction de
R/R∗
=> axe instantané de rotation.
–Norme de=
R/R∗
> vitesse angulaire instantanée de rotation.
R/R∗=˙
k '
di '=d
k '∧
i '=d
j '
dj '=d
k '∧
j '=d−
i '
di '=˙
dt
k '∧
i '=
R/R∗∧
i ' dt
di '
dt
∣
R∗
=
R/R∗∧
i',
dj '
dt
∣
R∗
=
R/R∗∧
j ' ,
dk '
dt
∣
R∗
=
R/R∗∧
k '
Avec
R/R∗
vecteur instantané de rotation du trièdre
i ' ,
j ' ,
k '
dans R*.
Remarque :
R/R∗
peut varier en norme et en direction au cours du temps.

2) Description du mouvement dans deux référentiels :
a) Dérivation d'un vecteur dans deux référentiels :
Voir fiche.
R est caractérisé par son mouvement dans R*.
vR∗O ',
R/R∗
.
Dans R*,
db
dt
∣
R∗
=d
dt
bx
i 'by
j 'bz
k '
∣
R∗
=d bx
i '
dt
∣
R∗
d b y
j '
dt
∣
R∗
d bz
k '
dt
∣
R∗
=˙
bx
i 'bx
d
i
dt
∣
R∗
˙
by
j 'by
d
j
dt
∣
R∗
˙
bz
k 'bz
d
k
dt
∣
R∗
d
b
dt
∣
R∗
=d
b
dt
∣
R
bxR/R∗
byR/R∗
byR/R∗
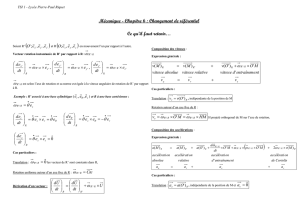
Formule fondamentale :
d
b
dt
∣
R∗
=
R/R∗∧
bd
b
dt
∣
R
Remarque : La dérivée d'un vecteur dépend du référentiel d'étude.
b) Mouvement d'un point M dans deux référentiels :
Position :
Dans R*
OM
Dans R
O' M
D'où
OM=
OO '
O ' M
avec
OO '
connu.
Vitesse :
Dans R*
vR∗M= d
OM
dt
∣
R∗
Dans R
vRM= d
O ' M
dt
∣
R
Accélération :
Dans R*
aR∗M= d²
OM
dt²
∣
R∗
Dans R
aRM= d²
O ' M
dt²
∣
R
3) Loi de composition des vitesses :
vR∗M= d
OM
dt
∣
R∗
=d
dt
OO '
O ' M
∣
R∗
= vR∗O' d
O' M
dt
∣
R
R/R∗∧
O ' M= vR∗ vRM
R/R∗∧
O' M
vR∗M= vR∗O ' vRM
R/R∗∧
O' M

vR∗M
Vitesse de M dans R* ou vitesse absolue.
vRM
Vitesse de M dans R ou vitesse relative.
vR∗O '
R/R∗∧
O ' M
Vitesse d'entrainement.
La vitesse d'entrainement est la vitesse du point coïncidant P. Le point P est un point fixe de
R coïncidant avec le point mobile M à l'instant t.
Exemple :
R/R∗= uz
vR∗M= vR∗O' uz∧
O' M vRM= vRM uz∧rur= vRMr u
4) Loi de composition des accélérations :
d
b
dt
∣
R∗
=d
b
dt
∣
R
R/R∗∧
b
d
dt [ vR∗M= vRM vR∗O '
R/R∗∧
O ' M ]
∣
R∗
dvR∗
dt M
∣
R∗
= aR∗M= dvRM
dt
∣
R∗
dvR∗O '
dt
∣
R∗
d
R/R∗
dt
∣
R∗
∧
O' M R/R∗∧d
O ' M
dt
∣
R∗
aR∗M= aRM aR∗O '
˙
R/R∗∧
O' M2
R/R∗∧ vRM
R/R∗∧
R/R∗∧
O ' M
aR∗M
Accélération absolue.
aRM
Accélération relative.
aeM= aR∗O '
˙
R/R∗∧
O ' M
R/R∗∧
R/R∗∧
O' M
= accélération du point coïncidant à M à
l'instant fixe dans R.
aCM=2
R/R∗∧ vRM
Accélération de Coriolis. Non nulle pour un point mobile dans R.
aR∗M= aRM= aeM acM
Remarque : On traitera souvent
˙
R/R∗=
0
Exercice : Train. Mouvement de translation :
R/R∗=
0
aeM= aR∗O '
Si le mouvement est rectiligne et uniforme,
aR∗O' =
0
aC=
0
aR∗M= aRM aR∗O'
Manège
R/R∗= uz=
cste
vR∗O '=
0
aR∗O'=
0
R/R∗∧
R/R∗∧
O ' M= uz∧r u=−r2ur
accélération radiale selon
−ur
.
aeM=−r2
ur
.
aC=2
R/R∗∧ vRM
aC=2 uz∧ vRM
aC⊥ vRM

II) Dynamique galiléenne et non galiléenne :
Cinématique, pas de différence entre les référentiels, on peut passer de R à R* en utilisant les
lois de composition dynamique. Le PFD privilégie les référentiels galiléens.
1) Relativité galiléenne :
Un référentiel est supposé galiléen si un système isolé ou pseudo isolé se déplace de manière
rectiligne et uniforme dans ce système.
Deux référentiels galiléens sont en translation rectiligne uniforme l'un par rapport à l'autre.
On pourra considérer un référentiel galiléen si les lois de Newton s'appliquent dans ce
référentiel.
Principe de la relativité galiléenne :
Les lois de la dynamique sont les même dans tous les référentiels galiléens
2) Principe fondamental de la dynamique en référentiel non galiléen :
R* supposé galiléen, R supposé non galiléen.
vR∗O '
non constante et/ou
R/R∗≠
0
.
Bilan des forces (interaction de M avec l'extérieur).
∑
F=maR∗M
aR∗M= aRM aeM aCM
∑
F=m aRM aeM aCM
PFD dans un référentiel non galiléen :
maRM=∑
F−maeM−maCM
fie=−maeM
force d'inertie d'entraînement.
fic =−maCM
force d'inertie de Cariolis.
maRM=∑
F
fie
fic
Remarque : Pour appliquer le PFD en référentiel non galiléen R, il faut connaître le mouvement de
R par rapport à un référentiel galiléen (mouvement de translation et rotation) => il faut trouver un
référentiel galiléen.
3) Forces d'inertie :
fie=−mae=−m aR∗O '
˙
R/R∗∧
O ' M
R/R∗∧
R/R∗∧
O ' M
Cas du train,
R/R∗=
0
fie=−maR∗O '
fic=
0
fie
indépendante de la position du point M et de son mouvement.
Ainsi les passagers ressentent tous la même force.
Cas du manège :
aR∗O'=
0
,
R/R∗= uz
ae=−r ur
fie=m2rur
force centrifuge.

La force d'inertie d'entrainement dépend de la position du point M.
Expression de
fie
: (cas où
aR∗O'=
0
)
Repérage cylindrique.
O' M=rurzuz
vRM=˙rurr˙
u ˙zuz
R/R∗∧
R/R∗∧
O ' M= uz∧ uz∧rurzuz=−2rur
, distance du point M à l'axe de
rotation.
rur=
HM
,
fie=−m
R/R∗
R/R∗∧
O ' M
fie =m2
HM
H projeté orthogonal de M sur l'axe de rotation.
Cas du manège : force de Coriolis.
fic=−2m uz∧ vRM⊥v
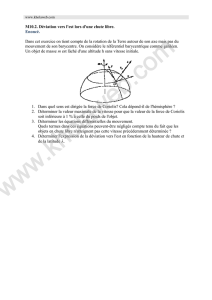
En effet, si on lance une balle à une personne à l'autre bout du manège, la trajectoire de la balle va
être courbée par la force de Coriolis.
4) Théorème du moment cinétique en référentiel non galiléen :
En référentiel galiléen,
LO=
OM ∧mvR∗M
.
d
LO
dt
∣
R∗
=∑
i
OM ∧
Fi
En référentiel non galiléen.
LO'=
O ' M∧mvRM
d
LO'
dt
∣
R
=∑
O ' M∧
Fi
O ' M ∧
fie
O' M∧
fic
Remarque :
O' M∧
R/R∗∧
R/R∗∧
O ' M =
O ' M∧−2
HM =0
5) Théorème de l'énergie cinétique :
ECR∗=1
2m vR∗
2M
ECR∗=∑
i
W
Fi
, dans un référentiel non galiléen.
ECR=1
2M v R
2M
ECR=∑W
FiW
fieW
fic
fic⊥trajectoire
=> elle ne travaille pas.
W
fic=0
Travail de fie dans le cas où
fie=m2
HM
.
Coordonnées cylindriques.
dl=dr urr d udz uz
fie=m2rur
fie.
dl=m2r dr
Le travail de fie est indépendant de la trajectoire =>
fie
est conservative.
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%