ISOMÉTRIES ET SIMILITUDES

———————————————————————
ISOM´
ETRIES ET SIMILITUDES
———————————————————————
Aziz El Kacimi

.

1. Structure euclidienne
1.1. Une forme bilin´eaire sur −→
Vest une application g:−→
V × −→
V −→ Rtelle que, pour tous
−→
u , −→
v∈−→
V, les applications partielles :
g(., −→
v) : −→
u∈−→
V −→ Ret g(−→
u , .) : −→
v∈−→
V −→ R
d´efinies par g(., −→
v)(−→
u) = g(−→
u , −→
v) et g(−→
u , .)(−→
v) = g(−→
u , −→
v) soient lin´eaires. On dira que
gest sym´etrique si elle v´erifie g(−→
u , −→
v) = g(−→
v , −→
u) pour tous −→
u , −→
v∈−→
V.On appelle noyau
d’une forme bilin´eaire sym´etrique gsur −→
Vl’ensemble
−→
u∈−→
V:g(−→
u , −→
v) = 0,∀−→
v∈−→
V=−→
v∈−→
V:g(−→
u , −→
v) = 0,∀−→
u∈−→
V.
Soit gune forme bilin´eaire sym´etrique sur −→
V. L’application
Q:−→
u∈−→
V 7−→ Q(−→
u) = g(−→
u , −→
u)∈R
est appel´ee forme quadratique associ´ee `a g. On dira que g(ou Q) est non d´eg´en´er´ee si
g(−→
u , −→
v) = 0 pour tout −→
v∈−→
V=⇒−→
u=−→
0.
Ce qui revient aussi `a dire que le noyau de gest r´eduit `a {−→
0}. On dira que g(ou Q) est positive
si Q(−→
u)≥0 pour tout −→
u,d´efinie positive si Q(−→
u)>0 pour tout −→
unon nul. Evidemment, si
gest d´efinie positive, elle est non d´eg´en´er´ee.
Une forme bilin´eaire gsym´etrique d´efinie positive sur −→
Vest appel´ee produit scalaire sur
−→
V. Le plan vectoriel r´eel −→
Vmuni d’un produit scalaire gest appel´e plan vectoriel euclidien.
Ce produit scalaire sera not´e dor´enavant ⟨,⟩.
1.2. Proposition. Soit ⟨,⟩un produit scalaire sur −→
Vdont on notera Qla forme quadratique
associ´ee. Alors, pour −→
u , −→
v∈−→
V, on a :
i) ⟨−→
u , −→
v⟩2≤Q(−→
u)·Q(−→
v) (in´egalit´e de Cauchy-Schwarz).
ii) Q(−→
u+−→
v)≤Q(−→
u) + Q(−→
v) (in´egalit´e de Minkowski).
D´emonstration. Soient −→
u , −→
v∈−→
Vet λ∈R.
i) Comme Qest d´efinie positive, on a :
0≤Q(λ−→
u+−→
v)
≤ ⟨λ−→
u+−→
v , λ−→
u+−→
v⟩
≤λ2⟨−→
u , −→
u⟩+ 2λ⟨−→
u , −→
v⟩+⟨−→
v , −→
v⟩
≤λ2Q(−→
u) + 2λ⟨−→
u , −→
v⟩+Q(v).
Le polynˆome du second degr´e en λ:P(λ) = λ2Q(−→
u)+2λ⟨−→
u , −→
v⟩+Q(−→
v) est positif pour
tout λ∈R; son discriminant est donc n´egatif c’est-`a-dire ⟨−→
u , −→
v⟩2−Q(−→
u)Q(−→
v)≤0, ce qui
donne l’in´egalit´e cherch´ee.

4 G´eom´etrie S6
ii) On a :
Q(−→
u+−→
v) = Q(−→
u) + Q(−→
v) + 2⟨−→
u , −→
v⟩
≤Q(−→
u) + Q(−→
v) + 2Q(−→
u)Q(−→
v) (d’apr`es Cauchy-Schwarz)
≤(Q(−→
u) + Q(−→
v))2
ce qui donne Q(−→
u+−→
v)≤Q(−→
u) + Q(−→
v).
1.3. On se donne maintenant un produit scalaire ⟨,⟩sur −→
V. Pour tout −→
u∈−→
Von pose :
(1) ||−→
u|| =Q(−→
u).
Il est facile de voir que l’appication || || :−→
V −→ R+ainsi d´efinie est une norme sur −→
V.
`
A la norme || || qu’on vient de d´efinir sur l’espace vectoriel −→
Vest associ´ee une distance
dsur l’espace affine Pdonn´ee par :
(2) d(M, N) = ||−−→
MN||.
Cette distance est bien entendu invariante par toute translation c’est-`a-dire pour tous points
M, N ∈ P et tout vecteur −→
uon a d(M+−→
u , N +−→
u) = d(M, N). Il est aussi facile de voir que la
norme v´erifie une ´egalit´e remarquable appel´ee identit´e du parall´elogramme (sa d´emonstration
est imm´ediate) :
Fig. 1
(3) ||−→
u+−→
v||2+||−→
u−−→
v||2= 2 ||−→
u||2+||−→
v||2.
Une norme quelconque ne v´erifie pas cette identit´e : il faut qu’elle provienne d’un produit
scalaire ! Ce qui n’est pas toujours le cas.
Le plan affine (P,−→
V,Φ) muni d’un produit scalaire ⟨,⟩est appel´e plan affine euclidien.
1.4. Orthogonalit´e
•On dira que deux vecteurs −→
uet −→
vsont orthogonaux (aussi : −→
uest orthogonal `a −→
v
ou −→
vest orthogonal `a −→
u) si ⟨−→
u , −→
v⟩= 0. Bien entendu, le vecteur nul −→
0 est orthogonal `a
n’importe quel vecteur −→
u. Soit −→
Aune partie de −→
V; on appelle orthogonal de −→
Al’ensemble :
(4) −→
A⊥={−→
u∈−→
V:⟨−→
u , −→
a⟩= 0 pour tout −→
a∈A}.

Isom´etries et similitudes 5
Il est facile de v´erifier que −→
A⊥est toujours un espace vectoriel (que −→
Ale soit ou non).
Si −→
Aest une droite vectorielle, −→
A⊥est aussi une droite vectorielle. On a alors une
d´ecomposition orthogonale −→
V=−→
A ⊕ −→
A⊥; la projection −→
psur −→
Aparall`ement `a −→
A⊥est ce
qu’on appelle la projection orthogonale sur −→
A. C’est une application lin´eaire et sa restriction
`a −→
Aest l’identit´e ; elle v´erifie en plus l’in´egalit´e ||−→
p(−→
w)|| ≤ ||−→
w|| pour tout vecteur −→
w.
Soit maintenant Aun sous-espace affine de P. L’orthogonal de Aau point ω∈ P est
l’ensemble :
A⊥
ω={M∈ P :⟨−−→
ωM, −−→
AB⟩= 0 pour tous A, B ∈ A}.
Il est clair que ω∈ A⊥. Il est aussi facile de voir que si Aest r´eduite `a un point, A⊥est le
plan affine Ptout entier, si Aest une droite, A⊥est aussi une droite et si Aest Ptout entier,
A⊥est r´eduite `a ω.
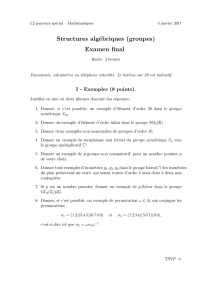
Soit Dune droite affine. La projection psur Dde direction −→
D⊥est la projection or-
thogonale sur D; c’est une application affine et sa restriction `a Dest l’identit´e. Le projet´e
orthogonal M0d’un point Msur Dr´ealise la distance entre Met la droite Dc’est-`a-dire
d(M, D) = inf
D∈D d(M, D) = d(M, M0).
Droite D= (OM0) et p(M) = M0
Fig. 2
1.5. Th´eor`eme de Pythagore (*). Soient A,Bet Ctrois points de Ptels que les vecteurs
−−→
AB et −→
AC soient orthogonaux. Alors :
(5) ||−−→
BC||2=||−−→
AB||2+||−→
AC||2c’est-`a-dire d(B, C)2=d(A, B)2+d(A, C)2.
Le th´eor`eme de Pythagore et le th´eor`eme de Thal`es sont les piliers de la g´eom´etrie (peut-ˆetre
mˆeme des math´ematiques) ! La d´emonstration originale du premier est ´el´egante ; celle par le
calcul usant du produit scalaire est imm´ediate.
(*) Pythagore :math´ematicien et philosophe grec n´e en 580 avant av. J.C. et mort en 495 av. J.C.
Connu ´evidemment par son ”fameux th´eor`eme” mais aussi pour pas mal d’autres travaux en math´ematiques,
notamment en th´eorie des nombres.
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%